|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
#include <fakeMotor/FakeMotor.h>
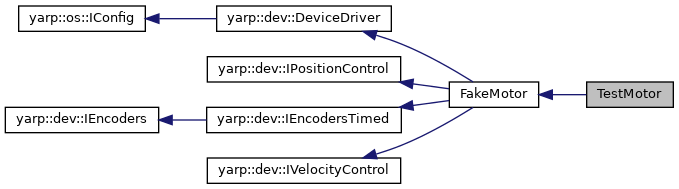
 Inheritance diagram for TestMotor:
Inheritance diagram for TestMotor:Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| Public Member Functions inherited from FakeMotor | |
| FakeMotor ()=default | |
| FakeMotor (const FakeMotor &)=delete | |
| FakeMotor (FakeMotor &&)=delete | |
| FakeMotor & | operator= (const FakeMotor &)=delete |
| FakeMotor & | operator= (FakeMotor &&)=delete |
| ~FakeMotor () override=default | |
| bool | getAxes (int *ax) override |
| Get the number of controlled axes. More... | |
| bool | positionMove (int j, double ref) override |
| Set new reference point for a single axis. More... | |
| bool | positionMove (const double *refs) override |
| Set new reference point for all axes. More... | |
| bool | relativeMove (int j, double delta) override |
| Set relative position. More... | |
| bool | relativeMove (const double *deltas) override |
| Set relative position, all joints. More... | |
| bool | checkMotionDone (int j, bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | checkMotionDone (bool *flag) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeed (int j, double sp) override |
| Set reference speed for a joint, this is the speed used during the interpolation of the trajectory. More... | |
| bool | setRefSpeeds (const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAcceleration (int j, double acc) override |
| Set reference acceleration for a joint. More... | |
| bool | setRefAccelerations (const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeed (int j, double *ref) override |
| Get reference speed for a joint. More... | |
| bool | getRefSpeeds (double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAcceleration (int j, double *acc) override |
| Get reference acceleration for a joint. More... | |
| bool | getRefAccelerations (double *accs) override |
| Get reference acceleration of all joints. More... | |
| bool | stop (int j) override |
| Stop motion, single joint. More... | |
| bool | stop () override |
| Stop motion, multiple joints. More... | |
| bool | positionMove (const int n_joint, const int *joints, const double *refs) override |
| Set new reference point for a subset of joints. More... | |
| bool | relativeMove (const int n_joint, const int *joints, const double *deltas) override |
| Set relative position for a subset of joints. More... | |
| bool | checkMotionDone (const int n_joint, const int *joints, bool *flags) override |
| Check if the current trajectory is terminated. More... | |
| bool | setRefSpeeds (const int n_joint, const int *joints, const double *spds) override |
| Set reference speed on all joints. More... | |
| bool | setRefAccelerations (const int n_joint, const int *joints, const double *accs) override |
| Set reference acceleration on all joints. More... | |
| bool | getRefSpeeds (const int n_joint, const int *joints, double *spds) override |
| Get reference speed of all joints. More... | |
| bool | getRefAccelerations (const int n_joint, const int *joints, double *accs) override |
| Get reference acceleration for a joint. More... | |
| bool | stop (const int n_joint, const int *joints) override |
| Stop motion for subset of joints. More... | |
| bool | getTargetPosition (const int joint, double *ref) override |
| Get the last position reference for the specified axis. More... | |
| bool | getTargetPositions (double *refs) override |
| Get the last position reference for all axes. More... | |
| bool | getTargetPositions (const int n_joint, const int *joints, double *refs) override |
| Get the last position reference for the specified group of axes. More... | |
| bool | velocityMove (const int n_joint, const int *joints, const double *spds) override |
| Start motion at a given speed for a subset of joints. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | resetEncoder (int j) override |
| Reset encoder, single joint. More... | |
| bool | resetEncoders () override |
| Reset encoders. More... | |
| bool | setEncoder (int j, double val) override |
| Set the value of the encoder for a given joint. More... | |
| bool | setEncoders (const double *vals) override |
| Set the value of all encoders. More... | |
| bool | getEncoder (int j, double *v) override |
| Read the value of an encoder. More... | |
| bool | getEncoders (double *encs) override |
| Read the position of all axes. More... | |
| bool | getEncoderTimed (int j, double *encs, double *time) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncodersTimed (double *encs, double *time) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | getEncoderSpeed (int j, double *sp) override |
| Read the istantaneous speed of an axis. More... | |
| bool | getEncoderSpeeds (double *spds) override |
| Read the instantaneous speed of all axes. More... | |
| bool | getEncoderAcceleration (int j, double *spds) override |
| Read the instantaneous acceleration of an axis. More... | |
| bool | getEncoderAccelerations (double *accs) override |
| Read the instantaneous acceleration of all axes. More... | |
| bool | velocityMove (int j, double sp) override |
| Start motion at a given speed, single joint. More... | |
| bool | velocityMove (const double *sp) override |
| Start motion at a given speed, multiple joints. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IPositionControl | |
| virtual | ~IPositionControl () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncodersTimed | |
| virtual | ~IEncodersTimed () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IEncoders | |
| virtual | ~IEncoders () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IVelocityControl | |
| virtual | ~IVelocityControl () |
| Destructor. More... | |
| virtual bool | getRefVelocity (const int joint, double *vel) |
| Get the last reference speed set by velocityMove for single joint. More... | |
| virtual bool | getRefVelocities (double *vels) |
| Get the last reference speed set by velocityMove for all joints. More... | |
| virtual bool | getRefVelocities (const int n_joint, const int *joints, double *vels) |
| Get the last reference speed set by velocityMove for a group of joints. More... | |
Definition at line 409 of file FakeMotor.h.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from FakeMotor.
Definition at line 32 of file FakeMotor.cpp.