|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
Control interface for frame grabber devices. More...
#include <yarp/dev/FrameGrabberInterfaces.h>
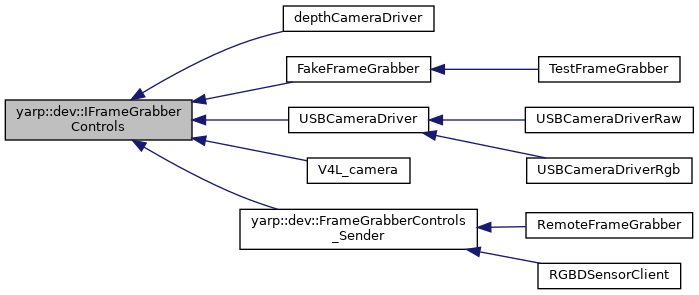
 Inheritance diagram for yarp::dev::IFrameGrabberControls:
Inheritance diagram for yarp::dev::IFrameGrabberControls:Public Member Functions | |
| virtual | ~IFrameGrabberControls () |
| Destructor. More... | |
| virtual bool | setBrightness (double v) |
| Set the brightness. More... | |
| virtual bool | setExposure (double v) |
| Set the exposure. More... | |
| virtual bool | setSharpness (double v) |
| Set the sharpness. More... | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set the white balance for the frame grabber. More... | |
| virtual bool | setHue (double v) |
| Set the hue. More... | |
| virtual bool | setSaturation (double v) |
| Set the saturation. More... | |
| virtual bool | setGamma (double v) |
| Set the gamma. More... | |
| virtual bool | setShutter (double v) |
| Set the shutter parameter. More... | |
| virtual bool | setGain (double v) |
| Set the gain. More... | |
| virtual bool | setIris (double v) |
| Set the iris. More... | |
| virtual double | getBrightness () |
| Read the brightness parameter. More... | |
| virtual double | getExposure () |
| Read the exposure parameter. More... | |
| virtual double | getSharpness () |
| Read the sharpness parameter. More... | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Read the white balance parameters. More... | |
| virtual double | getHue () |
| Read the hue parameter. More... | |
| virtual double | getSaturation () |
| Read the saturation parameter. More... | |
| virtual double | getGamma () |
| Read the gamma parameter. More... | |
| virtual double | getShutter () |
| Read the shutter parameter. More... | |
| virtual double | getGain () |
| Read the gain parameter. More... | |
| virtual double | getIris () |
| Read the iris parameter. More... | |
| cameraFeature_id_t | featureVOCABEnum (int vocab) |
| int | featureEnum2Vocab (cameraFeature_id_t _enum) |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
| virtual bool | getCameraDescription (CameraDescriptor *camera)=0 |
| Get a basic description of the camera hw. More... | |
| virtual bool | hasFeature (int feature, bool *hasFeature)=0 |
| Check if camera has the requested feature (saturation, brightness ... More... | |
| virtual bool | setFeature (int feature, double value)=0 |
| Set the requested feature to a value (saturation, brightness ... More... | |
| virtual bool | getFeature (int feature, double *value)=0 |
| Get the current value for the requested feature. More... | |
| virtual bool | setFeature (int feature, double value1, double value2)=0 |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| virtual bool | getFeature (int feature, double *value1, double *value2)=0 |
| Get the current value for the requested feature. More... | |
| virtual bool | hasOnOff (int feature, bool *HasOnOff)=0 |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| virtual bool | setActive (int feature, bool onoff)=0 |
| Set the requested feature on or off. More... | |
| virtual bool | getActive (int feature, bool *isActive)=0 |
| Get the current status of the feature, on or off. More... | |
| virtual bool | hasAuto (int feature, bool *hasAuto)=0 |
| Check if the requested feature has the 'auto' mode. More... | |
| virtual bool | hasManual (int feature, bool *hasManual)=0 |
| Check if the requested feature has the 'manual' mode. More... | |
| virtual bool | hasOnePush (int feature, bool *hasOnePush)=0 |
| Check if the requested feature has the 'onePush' mode. More... | |
| virtual bool | setMode (int feature, FeatureMode mode)=0 |
| Set the requested mode for the feature. More... | |
| virtual bool | getMode (int feature, FeatureMode *mode)=0 |
| Get the current mode for the feature. More... | |
| virtual bool | setOnePush (int feature)=0 |
| Set the requested feature to a value (saturation, brightness ... More... | |
Control interface for frame grabber devices.
Definition at line 364 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Destructor.
Definition at line 370 of file FrameGrabberInterfaces.h.
|
inline |
Definition at line 568 of file FrameGrabberInterfaces.h.
|
inline |
Definition at line 539 of file FrameGrabberInterfaces.h.
|
inline |
Definition at line 510 of file FrameGrabberInterfaces.h.
|
pure virtual |
Get the current status of the feature, on or off.
| feature | the identifier of the feature to check |
| isActive | flag true if the feature is active, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, USBCameraDriver, FakeFrameGrabber, depthCameraDriver, and V4L_camera.
|
inlinevirtual |
Read the brightness parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 451 of file FrameGrabberInterfaces.h.
|
pure virtual |
Get a basic description of the camera hw.
This is mainly used to determine the HW bus type in order to choose the corresponding interface for advanced controls.
| device | returns an identifier for the bus |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Read the exposure parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 457 of file FrameGrabberInterfaces.h.
|
pure virtual |
Get the current value for the requested feature.
| feature | the identifier of the feature to read |
| value | pointer to current value of the feature, from 0 to 1 expressed as a percentage |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
pure virtual |
Get the current value for the requested feature.
| feature | the identifier of the feaature to read |
| value1 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
| value2 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Read the gain parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 501 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the gamma parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 489 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the hue parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 477 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the iris parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 507 of file FrameGrabberInterfaces.h.
|
pure virtual |
Get the current mode for the feature.
| feature | the identifier of the feature to change |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Read the saturation parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 483 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the sharpness parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 463 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the shutter parameter.
Reimplemented in RemoteFrameGrabber.
Definition at line 495 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Read the white balance parameters.
| blue | reference to return value for the red parameter. |
| red | reference to return value for the green parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 471 of file FrameGrabberInterfaces.h.
|
pure virtual |
Check if the requested feature has the 'auto' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, USBCameraDriver, FakeFrameGrabber, depthCameraDriver, and V4L_camera.
|
pure virtual |
Check if camera has the requested feature (saturation, brightness ...
)
| feature | the identifier of the feature to check |
| hasFeature | flag value: true if the feature is present, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
pure virtual |
Check if the requested feature has the 'manual' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'manual' mode, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, USBCameraDriver, FakeFrameGrabber, depthCameraDriver, and V4L_camera.
|
pure virtual |
Check if the requested feature has the 'onePush' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'onePush' mode, false otherwise |
Implemented in yarp::dev::FrameGrabberControls_Sender, USBCameraDriver, FakeFrameGrabber, depthCameraDriver, and V4L_camera.
|
pure virtual |
Check if the camera has the ability to turn on/off the requested feature.
| feature | the identifier of the feature to change |
| hasOnOff | flag true if this feature can be turned on/off, false otherwise. |
Implemented in yarp::dev::FrameGrabberControls_Sender, USBCameraDriver, FakeFrameGrabber, depthCameraDriver, and V4L_camera.
|
pure virtual |
Set the requested feature on or off.
| feature | the identifier of the feature to change |
| onoff | true to activate, off to deactivate the feature |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Set the brightness.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 379 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the exposure.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 386 of file FrameGrabberInterfaces.h.
|
pure virtual |
Set the requested feature to a value (saturation, brightness ...
)
| feature | the identifier of the feature to change |
| value | new value of the feature, range from 0 to 1 expressed as a percentage |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
pure virtual |
Set the requested feature to a value using 2 params (like white balance)
| feature | the identifier of the feature to change |
| value1 | first param, from 0 to 1 expressed as a percentage |
| value2 | second param, from 0 to 1 expressed as a percentage |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Set the gain.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 436 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the gamma.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 422 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the hue.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 408 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the iris.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 443 of file FrameGrabberInterfaces.h.
|
pure virtual |
Set the requested mode for the feature.
| feature | the identifier of the feature to change |
| auto_onoff | true to activate 'auto' mode, false to activate 'manual' mode |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
pure virtual |
Set the requested feature to a value (saturation, brightness ...
)
| feature | the identifier of the feature to change |
| value | new value of the feature, from 0 to 1 as a percentage of param range |
Implemented in yarp::dev::FrameGrabberControls_Sender, V4L_camera, USBCameraDriver, FakeFrameGrabber, and depthCameraDriver.
|
inlinevirtual |
Set the saturation.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 415 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the sharpness.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 393 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the shutter parameter.
| v | new value for parameter. |
Reimplemented in RemoteFrameGrabber.
Definition at line 429 of file FrameGrabberInterfaces.h.
|
inlinevirtual |
Set the white balance for the frame grabber.
| blue | component gain. |
| red | component gain. |
Reimplemented in RemoteFrameGrabber.
Definition at line 401 of file FrameGrabberInterfaces.h.
|
inline |
Definition at line 585 of file FrameGrabberInterfaces.h.