|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
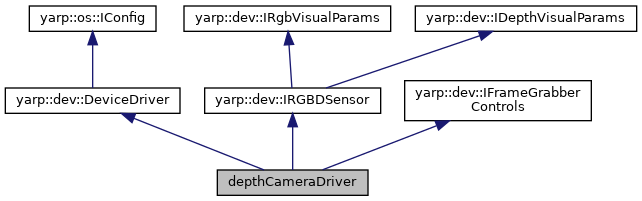
depthCamera: YARP driver for OpenNI2 compatible devices.
More...
#include <depthCamera/depthCameraDriver.h>
 Inheritance diagram for depthCameraDriver:
Inheritance diagram for depthCameraDriver:Public Member Functions | |
| depthCameraDriver () | |
| ~depthCameraDriver () | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| int | getRgbHeight () override |
| Return the height of each frame. More... | |
| int | getRgbWidth () override |
| Return the width of each frame. More... | |
| bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) override |
| Get the possible configurations of the camera. More... | |
| bool | getRgbResolution (int &width, int &height) override |
| Get the resolution of the rgb image from the camera. More... | |
| bool | setRgbResolution (int width, int height) override |
| Set the resolution of the rgb image from the camera. More... | |
| bool | getRgbFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the rgb camera. More... | |
| bool | setRgbFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the rgb camera. More... | |
| bool | getRgbMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setRgbMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| bool | getRgbIntrinsicParam (Property &intrinsic) override |
| Get the intrinsic parameters of the rgb camera. More... | |
| int | getDepthHeight () override |
| Return the height of each frame. More... | |
| int | getDepthWidth () override |
| Return the height of each frame. More... | |
| bool | setDepthResolution (int width, int height) override |
| Set the resolution of the depth image from the camera. More... | |
| bool | getDepthFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the depth camera. More... | |
| bool | setDepthFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the depth camera. More... | |
| bool | getDepthIntrinsicParam (Property &intrinsic) override |
| Get the intrinsic parameters of the depth camera. More... | |
| double | getDepthAccuracy () override |
| Get the minimum detectable variation in distance [meter]. More... | |
| bool | setDepthAccuracy (double accuracy) override |
| Set the minimum detectable variation in distance [meter] when possible. More... | |
| bool | getDepthClipPlanes (double &nearPlane, double &farPlane) override |
| Get the clipping planes of the sensor. More... | |
| bool | setDepthClipPlanes (double nearPlane, double farPlane) override |
| Set the clipping planes of the sensor. More... | |
| bool | getDepthMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setDepthMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| bool | getExtrinsicParam (yarp::sig::Matrix &extrinsic) override |
| Get the extrinsic parameters from the device. More... | |
| bool | getRgbImage (FlexImage &rgbImage, Stamp *timeStamp=NULL) override |
| Get the rgb frame from the device. More... | |
| bool | getDepthImage (depthImage &depthImage, Stamp *timeStamp=NULL) override |
| bool | getImages (FlexImage &colorFrame, depthImage &depthFrame, Stamp *colorStamp=NULL, Stamp *depthStamp=NULL) override |
| RGBDSensor_status | getSensorStatus () override |
| Get the surrent status of the sensor, using enum type. More... | |
| std::string | getLastErrorMsg (Stamp *timeStamp=NULL) override |
| Return an error message in case of error. More... | |
| bool | getCameraDescription (CameraDescriptor *camera) override |
| Get a basic description of the camera hw. More... | |
| bool | hasFeature (int feature, bool *hasFeature) override |
| Check if camera has the requested feature (saturation, brightness ... More... | |
| bool | setFeature (int feature, double value) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| bool | getFeature (int feature, double *value) override |
| Get the current value for the requested feature. More... | |
| bool | setFeature (int feature, double value1, double value2) override |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| bool | getFeature (int feature, double *value1, double *value2) override |
| Get the current value for the requested feature. More... | |
| bool | hasOnOff (int feature, bool *HasOnOff) override |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| bool | setActive (int feature, bool onoff) override |
| Set the requested feature on or off. More... | |
| bool | getActive (int feature, bool *isActive) override |
| Get the current status of the feature, on or off. More... | |
| bool | hasAuto (int feature, bool *hasAuto) override |
| Check if the requested feature has the 'auto' mode. More... | |
| bool | hasManual (int feature, bool *hasManual) override |
| Check if the requested feature has the 'manual' mode. More... | |
| bool | hasOnePush (int feature, bool *hasOnePush) override |
| Check if the requested feature has the 'onePush' mode. More... | |
| bool | setMode (int feature, FeatureMode mode) override |
| Set the requested mode for the feature. More... | |
| bool | getMode (int feature, FeatureMode *mode) override |
| Get the current mode for the feature. More... | |
| bool | setOnePush (int feature) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IRGBDSensor | |
| virtual | ~IRGBDSensor () |
| virtual bool | getDepthImage (yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthImage, yarp::os::Stamp *timeStamp=NULL)=0 |
| Get the depth frame from the device. More... | |
| virtual bool | getImages (yarp::sig::FlexImage &colorFrame, yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthFrame, yarp::os::Stamp *colorStamp=NULL, yarp::os::Stamp *depthStamp=NULL)=0 |
| Get the both the color and depth frame in a single call. More... | |
| Public Member Functions inherited from yarp::dev::IRgbVisualParams | |
| virtual | ~IRgbVisualParams () |
| Public Member Functions inherited from yarp::dev::IDepthVisualParams | |
| virtual | ~IDepthVisualParams () |
| Public Member Functions inherited from yarp::dev::IFrameGrabberControls | |
| virtual | ~IFrameGrabberControls () |
| Destructor. More... | |
| virtual bool | setBrightness (double v) |
| Set the brightness. More... | |
| virtual bool | setExposure (double v) |
| Set the exposure. More... | |
| virtual bool | setSharpness (double v) |
| Set the sharpness. More... | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set the white balance for the frame grabber. More... | |
| virtual bool | setHue (double v) |
| Set the hue. More... | |
| virtual bool | setSaturation (double v) |
| Set the saturation. More... | |
| virtual bool | setGamma (double v) |
| Set the gamma. More... | |
| virtual bool | setShutter (double v) |
| Set the shutter parameter. More... | |
| virtual bool | setGain (double v) |
| Set the gain. More... | |
| virtual bool | setIris (double v) |
| Set the iris. More... | |
| virtual double | getBrightness () |
| Read the brightness parameter. More... | |
| virtual double | getExposure () |
| Read the exposure parameter. More... | |
| virtual double | getSharpness () |
| Read the sharpness parameter. More... | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Read the white balance parameters. More... | |
| virtual double | getHue () |
| Read the hue parameter. More... | |
| virtual double | getSaturation () |
| Read the saturation parameter. More... | |
| virtual double | getGamma () |
| Read the gamma parameter. More... | |
| virtual double | getShutter () |
| Read the shutter parameter. More... | |
| virtual double | getGain () |
| Read the gain parameter. More... | |
| virtual double | getIris () |
| Read the iris parameter. More... | |
| cameraFeature_id_t | featureVOCABEnum (int vocab) |
| int | featureEnum2Vocab (cameraFeature_id_t _enum) |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
Static Public Member Functions | |
| static int | pixFormatToCode (openni::PixelFormat p) |
Additional Inherited Members | |
| Public Types inherited from yarp::dev::IRGBDSensor | |
| enum | RGBDSensor_status { RGBD_SENSOR_NOT_READY = 0, RGBD_SENSOR_OK_STANBY = 1, RGBD_SENSOR_OK_IN_USE = 2, RGB_SENSOR_ERROR = 3, DEPTH_SENSOR_ERROR = 4, RGBD_SENSOR_GENERIC_ERROR = 5, RGBD_SENSOR_TIMEOUT = 6 } |
depthCamera: YARP driver for OpenNI2 compatible devices.
@ingroup dev_impl_media
This device driver exposes the IRGBDSensor and IFrameGrabberControls interfaces to read the images and operate on the available settings.
See the documentation for more details about each interface.
This device is paired with its server called RGBDSensorWrapper to stream the images and perform remote operations.
The config file is subdivided into 5 major sections called "SETTINGS", "HW_DESCRIPTION", "RGB_INTRINSIC_PARAMETERS", "DEPTH_INTRINSIC_PARAMETERS", "EXTRINSIC_PARAMETERS".
The "SETTINGS" section is meant for read/write parameters, meaning parameters which can be get and set by the device. A common case of setting is the image resolution in pixel. This setting will be read by the device and it'll be applied in the startup phase. If the setting fails, the device will terminate the execution with a error message.
The "HW_DESCRIPTION" section is meant for read only parameters which describe the hardware property of the device and cannot be provided by the device through software API. A common case is the 'Field Of View' property, which may or may not be supported by the physical device. When a property is present in the HW_DESCRIPTION group, the YARP RGBDSensorClient will report this value when asked for and setting will be disabled. This group can also be used to by-pass OpenNI2 API in case some functionality is not correctly working with the current device. For example the 'clipPlanes' property may return incorrect values or values using non-standard measurement unit. In this case using the HW_DESCRIPTION, a user can override the value got from OpenNI2 API with a custom value.
The [RGB/DEPTH_INTRINSIC_PARAMETERS] group describe the camera intrinsic parameters for rgb and depth respectively.
The [EXTRINSIC_PARAMETERS] group describe the position of the depth camera in the rgb camera frame. It is composed of a 4x4 rototranslation matrix.
| YARP device name |
|---|
depthCamera |
Parameters used by this device are:
| Parameter name | SubParameter | Type | Read / write | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|---|
| SETTINGS | - | group | Read / write | - | - | Yes | Initial setting of the device. | Properties must be read/writable in order for setting to work |
| rgbResolution | int, int | Read / write | pixels | - | Alternative to HW_DESCRIPTION | Size of rgb image in pixels | 2 values expected as height, width | |
| depthResolution | int, int | Read / write | pixels | - | Alternative to HW_DESCRIPTION | Size of depth image in pixels | Values are height, width | |
| accuracy | double | Read / write | meters | - | Alternative to HW_DESCRIPTION | Accuracy of the device, as the depth measurement error at 1 meter distance | ||
| rgbFOV | double, double | Read / write | degrees | - | Alternative to HW_DESCRIPTION | Horizontal and Vertical fields of view of the rgb camera | 2 values expected as horizontal and vertical FOVs | |
| depthFOV | double, double | Read / write | degrees | - | Alternative to HW_DESCRIPTION | Horizontal and Vertical fields of view of the depth camera | 2 values expected as horizontal and vertical FOVs | |
| rgbMirroring | bool | Read / write | true/false | false | Alternative to HW_DESCRIPTION | Set the mirroring to the acquired rgb image | ||
| depthMirroring | bool | Read / write | true/false | false | Alternative to HW_DESCRIPTION | Set the mirroring to the acquired depth image | ||
| clipPlanes | double, double | Read / write | meters | - | Alternative to HW_DESCRIPTION | Minimum and maximum distance at which an object is seen by the depth sensor | parameter introduced mainly for simulated sensors, it can be used to set the clip planes if Openni gives wrong values | |
| HW_DESCRIPTION | - | group | - | - | Yes | Hardware description of device property. | Read only property. Setting will be disabled | |
| same as 'SETTINGS' group | - | Read only | - | - | Alternative to SETTING group | Parameters here are alternative to the SETTING group | ||
| RGB_INTRINSIC_PARAMETERS | - | group | - | - | Yes | Description of rgb camera visual parameters | ||
| physFocalLength | double | m | - | Yes | Physical focal length of the lens in meters | |||
| focalLengthX | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |||
| focalLengthY | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |||
| principalPointX | double | pixel | - | Yes | X coordinate of the principal point | |||
| principalPointY | double | pixel | - | Yes | Y coordinate of the principal point | |||
| distortionModel | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'rgbDistortionModelGroup' | This is only another group's name to be searched for in the config file | ||
| rgbDistortionModelGroup | ||||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | ||
| k1 | double | - | - | Yes | ||||
| k2 | double | - | - | Yes | ||||
| k3 | double | - | - | Yes | ||||
| t1 | double | - | - | Yes | ||||
| t2 | double | - | - | Yes | ||||
| DEPTH_INTRINSIC_PARAMETERS | - | group | - | - | Yes | Description of depth camera visual parameters | ||
| physFocalLength | double | m | - | Yes | Physical focal length of the lens in meters | |||
| focalLengthX | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |||
| focalLengthY | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |||
| principalPointX | double | pixel | - | Yes | X coordinate of the principal point | |||
| principalPointY | double | pixel | - | Yes | Y coordinate of the principal point | |||
| distortionModel | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'depthDistortionModelGroup' | This is another group's name to be searched for in the config file | ||
| depthDistortionModelGroup | ||||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | ||
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | |||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | |||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | |||
| t1 | double | - | - | Yes | Tangential distortion of the lens | |||
| t2 | double | - | - | Yes | Tangential distortion of the lens | |||
| EXTRINSIC_PARAMETERS | - | - | - | Yes | ||||
| transformation | 4x4 double matrix | - | - | Yes | trasformation matrix between depth optical frame to the rgb one |
Configuration file using .ini format, using subdevice keyword.
Definition at line 193 of file depthCameraDriver.h.
| depthCameraDriver::depthCameraDriver | ( | ) |
Definition at line 148 of file depthCameraDriver.cpp.
| depthCameraDriver::~depthCameraDriver | ( | ) |
Definition at line 163 of file depthCameraDriver.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 454 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the current status of the feature, on or off.
| feature | the identifier of the feature to check |
| isActive | flag true if the feature is active, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1063 of file depthCameraDriver.cpp.
|
overridevirtual |
Get a basic description of the camera hw.
This is mainly used to determine the HW bus type in order to choose the corresponding interface for advanced controls.
| device | returns an identifier for the bus |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 901 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the minimum detectable variation in distance [meter].
Implements yarp::dev::IRGBDSensor.
Definition at line 692 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the clipping planes of the sensor.
| nearPlane | minimum distance at which the sensor start measuring. Object closer than this distance will not be detected. |
| farPlane | maximum distance beyond which the sensor stop measuring. Object farther than this distance will not be detected. |
Implements yarp::dev::IRGBDSensor.
Definition at line 701 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the field of view (FOV) of the depth camera.
| horizontalFov | will return the value of the horizontal fov in degrees |
| verticalFov | will return the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 674 of file depthCameraDriver.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 656 of file depthCameraDriver.cpp.
|
override |
Definition at line 763 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the intrinsic parameters of the depth camera.
| intrinsic | return a Property containing intrinsic parameters of the optical model of the camera. |
The yarp::os::Property describing the intrinsic parameters is expected to be in the form:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| physFocalLength | - | double | m | - | Yes | Physical focal length of the lens in meters | |
| focalLengthX | - | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |
| focalLengthY | - | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |
| principalPointX | - | double | pixel | - | Yes | X coordinate of the principal point | |
| principalPointY | - | double | pixel | - | Yes | Y coordinate of the principal point | |
| retificationMatrix | - | 4x4 double matrix | - | - | Yes | Matrix that describes the lens' distortion | |
| distortionModel | - | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'cameraDistortionModelGroup' | This is another group's name to be searched for in the config file |
| cameraDistortionModelGroup | |||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | |
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| t1 | double | - | - | Yes | Tangential distortion of the lens | ||
| t2 | double | - | - | Yes | Tangential distortion of the lens |
Implements yarp::dev::IRGBDSensor.
Definition at line 687 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the mirroring setting of the sensor.
| mirror | true if image is mirrored, false otherwise |
Implements yarp::dev::IDepthVisualParams.
Definition at line 729 of file depthCameraDriver.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 665 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the extrinsic parameters from the device.
| extrinsic | return a rototranslation matrix describing the position of the depth optical frame with respect to the rgb frame |
Implements yarp::dev::IRGBDSensor.
Definition at line 752 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the current value for the requested feature.
| feature | the identifier of the feature to read |
| value | pointer to current value of the feature, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 970 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the current value for the requested feature.
| feature | the identifier of the feaature to read |
| value1 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
| value2 | returns the current value of the feature, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1006 of file depthCameraDriver.cpp.
|
override |
Definition at line 864 of file depthCameraDriver.cpp.
|
overridevirtual |
Return an error message in case of error.
For debugging purpose and user notification. Error message will be reset after any successful command
Implements yarp::dev::IRGBDSensor.
Definition at line 896 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the current mode for the feature.
| feature | the identifier of the feature to change |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1164 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the field of view (FOV) of the rgb camera.
| horizontalFov | will return the value of the horizontal fov in degrees |
| verticalFov | will return the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 603 of file depthCameraDriver.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 465 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the rgb frame from the device.
The pixel type of the source image will usually be set as a VOCAB_PIXEL_RGB, but the user can call the function with the pixel type of his/her choice. The conversion if possible, will be done automatically on client side (TO BO VERIFIED). Note: this will consume CPU power because it will not use GPU optimization. Use VOCAB_PIXEL_RGB for best performances.
| rgbImage | the image to be filled. |
| timeStamp | time in which the image was acquired. Optional, ignored if nullptr. |
Implements yarp::dev::IRGBDSensor.
Definition at line 758 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the intrinsic parameters of the rgb camera.
| intrinsic | return a Property containing intrinsic parameters of the optical model of the camera. |
The yarp::os::Property describing the intrinsic parameters is expected to be in the form:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| physFocalLength | - | double | m | - | Yes | Physical focal length of the lens in meters | |
| focalLengthX | - | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |
| focalLengthY | - | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |
| principalPointX | - | double | pixel | - | Yes | X coordinate of the principal point | |
| principalPointY | - | double | pixel | - | Yes | Y coordinate of the principal point | |
| retificationMatrix | - | 4x4 double matrix | - | - | Yes | Matrix that describes the lens' distortion | |
| distortionModel | - | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'cameraDistortionModelGroup' | This is another group's name to be searched for in the config file |
| cameraDistortionModelGroup | |||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | |
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| t1 | double | - | - | Yes | Tangential distortion of the lens | ||
| t2 | double | - | - | Yes | Tangential distortion of the lens |
Implements yarp::dev::IRGBDSensor.
Definition at line 651 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the mirroring setting of the sensor.
| mirror | true if image is mirrored, false otherwise |
Implements yarp::dev::IRgbVisualParams.
Definition at line 616 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Reimplemented from yarp::dev::IRGBDSensor.
Definition at line 491 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the possible configurations of the camera.
| configurations | list of camera supported configurations as CameraConfig type |
Reimplemented from yarp::dev::IRGBDSensor.
Definition at line 485 of file depthCameraDriver.cpp.
|
overridevirtual |
Return the width of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 475 of file depthCameraDriver.cpp.
|
overridevirtual |
Get the surrent status of the sensor, using enum type.
Implements yarp::dev::IRGBDSensor.
Definition at line 869 of file depthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'auto' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'auto' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1082 of file depthCameraDriver.cpp.
|
overridevirtual |
Check if camera has the requested feature (saturation, brightness ...
)
| feature | the identifier of the feature to check |
| hasFeature | flag value: true if the feature is present, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 908 of file depthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'manual' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'manual' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1101 of file depthCameraDriver.cpp.
|
overridevirtual |
Check if the requested feature has the 'onePush' mode.
| feature | the identifier of the feature to check |
| hasAuto | flag true if the feature is has 'onePush' mode, false otherwise |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1120 of file depthCameraDriver.cpp.
|
overridevirtual |
Check if the camera has the ability to turn on/off the requested feature.
| feature | the identifier of the feature to change |
| hasOnOff | flag true if this feature can be turned on/off, false otherwise. |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1012 of file depthCameraDriver.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 423 of file depthCameraDriver.cpp.
|
static |
Definition at line 768 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature on or off.
| feature | the identifier of the feature to change |
| onoff | true to activate, off to deactivate the feature |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1031 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the minimum detectable variation in distance [meter] when possible.
| the | desired resolution in meters. |
Implements yarp::dev::IRGBDSensor.
Definition at line 569 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the clipping planes of the sensor.
| nearPlane | minimum distance at which the sensor start measuring. Object closer than this distance will not be detected. |
| farPlane | maximum distance beyond which the sensor stop measuring. Object farther than this distance will not be detected. |
Implements yarp::dev::IRGBDSensor.
Definition at line 716 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the field of view (FOV) of the depth camera.
| horizontalFov | will set the value of the horizontal fov in degrees |
| verticalFov | will set the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 560 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the mirroring setting of the sensor.
| mirror | true if image should be mirrored, false otherwise |
Implements yarp::dev::IDepthVisualParams.
Definition at line 739 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the resolution of the depth image from the camera.
| width | image width |
| height | image height |
Implements yarp::dev::IRGBDSensor.
Definition at line 504 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value (saturation, brightness ...
)
| feature | the identifier of the feature to change |
| value | new value of the feature, range from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 929 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value using 2 params (like white balance)
| feature | the identifier of the feature to change |
| value1 | first param, from 0 to 1 expressed as a percentage |
| value2 | second param, from 0 to 1 expressed as a percentage |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1000 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the requested mode for the feature.
| feature | the identifier of the feature to change |
| auto_onoff | true to activate 'auto' mode, false to activate 'manual' mode |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1132 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the requested feature to a value (saturation, brightness ...
)
| feature | the identifier of the feature to change |
| value | new value of the feature, from 0 to 1 as a percentage of param range |
Implements yarp::dev::IFrameGrabberControls.
Definition at line 1184 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the field of view (FOV) of the rgb camera.
| horizontalFov | will set the value of the horizontal fov in degrees |
| verticalFov | will set the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 551 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the mirroring setting of the sensor.
| mirror | true if image should be mirrored, false otherwise |
Implements yarp::dev::IRgbVisualParams.
Definition at line 628 of file depthCameraDriver.cpp.
|
overridevirtual |
Set the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Implements yarp::dev::IRGBDSensor.
Definition at line 534 of file depthCameraDriver.cpp.