|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
An interface for retrieving intrinsic parameter from a rgb camera. More...
#include <yarp/dev/IVisualParams.h>
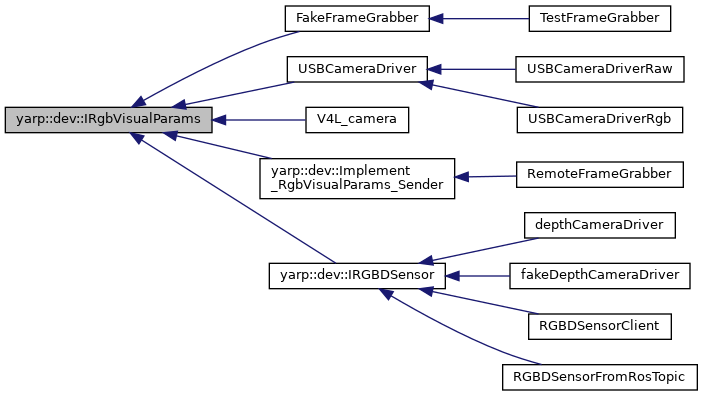
 Inheritance diagram for yarp::dev::IRgbVisualParams:
Inheritance diagram for yarp::dev::IRgbVisualParams:Public Member Functions | |
| virtual | ~IRgbVisualParams () |
| virtual int | getRgbHeight ()=0 |
| Return the height of each frame. More... | |
| virtual int | getRgbWidth ()=0 |
| Return the width of each frame. More... | |
| virtual bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) |
| Get the possible configurations of the camera. More... | |
| virtual bool | getRgbResolution (int &width, int &height) |
| Get the resolution of the rgb image from the camera. More... | |
| virtual bool | setRgbResolution (int width, int height)=0 |
| Set the resolution of the rgb image from the camera. More... | |
| virtual bool | getRgbFOV (double &horizontalFov, double &verticalFov)=0 |
| Get the field of view (FOV) of the rgb camera. More... | |
| virtual bool | setRgbFOV (double horizontalFov, double verticalFov)=0 |
| Set the field of view (FOV) of the rgb camera. More... | |
| virtual bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic)=0 |
| Get the intrinsic parameters of the rgb camera. More... | |
| virtual bool | getRgbMirroring (bool &mirror)=0 |
| Get the mirroring setting of the sensor. More... | |
| virtual bool | setRgbMirroring (bool mirror)=0 |
| Set the mirroring setting of the sensor. More... | |
An interface for retrieving intrinsic parameter from a rgb camera.
Definition at line 72 of file IVisualParams.h.
|
inlinevirtual |
Definition at line 75 of file IVisualParams.h.
|
pure virtual |
Get the field of view (FOV) of the rgb camera.
| horizontalFov | will return the value of the horizontal fov in degrees |
| verticalFov | will return the value of the vertical fov in degrees |
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Return the height of each frame.
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Get the intrinsic parameters of the rgb camera.
| intrinsic | return a Property containing intrinsic parameters of the optical model of the camera. |
The yarp::os::Property describing the intrinsic parameters is expected to be in the form:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| physFocalLength | - | double | m | - | Yes | Physical focal length of the lens in meters | |
| focalLengthX | - | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |
| focalLengthY | - | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |
| principalPointX | - | double | pixel | - | Yes | X coordinate of the principal point | |
| principalPointY | - | double | pixel | - | Yes | Y coordinate of the principal point | |
| retificationMatrix | - | 4x4 double matrix | - | - | Yes | Matrix that describes the lens' distortion | |
| distortionModel | - | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'cameraDistortionModelGroup' | This is another group's name to be searched for in the config file |
| cameraDistortionModelGroup | |||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | |
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| t1 | double | - | - | Yes | Tangential distortion of the lens | ||
| t2 | double | - | - | Yes | Tangential distortion of the lens |
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorClient, FakeFrameGrabber, RGBDSensorFromRosTopic, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Get the mirroring setting of the sensor.
| mirror | true if image is mirrored, false otherwise |
Implemented in yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
inlinevirtual |
Get the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Reimplemented in yarp::dev::Implement_RgbVisualParams_Sender, yarp::dev::IRGBDSensor, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
Definition at line 103 of file IVisualParams.h.
|
inlinevirtual |
Get the possible configurations of the camera.
| configurations | list of camera supported configurations as CameraConfig type |
Reimplemented in V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, depthCameraDriver, yarp::dev::Implement_RgbVisualParams_Sender, and yarp::dev::IRGBDSensor.
Definition at line 95 of file IVisualParams.h.
|
pure virtual |
Return the width of each frame.
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Set the field of view (FOV) of the rgb camera.
| horizontalFov | will set the value of the horizontal fov in degrees |
| verticalFov | will set the value of the vertical fov in degrees |
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Set the mirroring setting of the sensor.
| mirror | true if image should be mirrored, false otherwise |
Implemented in yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.
|
pure virtual |
Set the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Implemented in yarp::dev::IRGBDSensor, yarp::dev::Implement_RgbVisualParams_Sender, V4L_camera, USBCameraDriver, RGBDSensorFromRosTopic, RGBDSensorClient, FakeFrameGrabber, fakeDepthCameraDriver, and depthCameraDriver.