|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
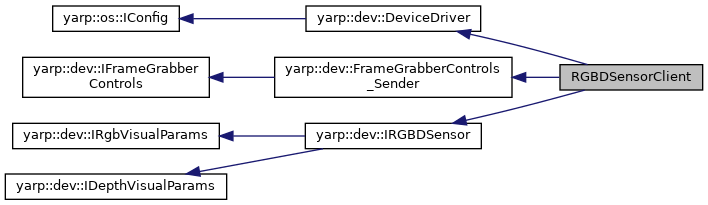
RGBDSensorClient: A Network client to receive data from kinect-like devices. This device will read from two streams of data through different ports, one for the color frame and the other one for depth image following Framegrabber and IDepthSensor interfaces specification respectively. See they documentation for more details about each interface.
More...
#include <RGBDSensorClient/RGBDSensorClient.h>
 Inheritance diagram for RGBDSensorClient:
Inheritance diagram for RGBDSensorClient:Public Member Functions | |
| RGBDSensorClient () | |
| RGBDSensorClient (const RGBDSensorClient &)=delete | |
| RGBDSensorClient (RGBDSensorClient &&)=delete | |
| RGBDSensorClient & | operator= (const RGBDSensorClient &)=delete |
| RGBDSensorClient & | operator= (RGBDSensorClient &&)=delete |
| ~RGBDSensorClient () override | |
| int | getRgbHeight () override |
| Return the height of each frame. More... | |
| int | getRgbWidth () override |
| Return the width of each frame. More... | |
| bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) override |
| Get the possible configurations of the camera. More... | |
| bool | getRgbResolution (int &width, int &height) override |
| Get the resolution of the rgb image from the camera. More... | |
| bool | setRgbResolution (int width, int height) override |
| Set the resolution of the rgb image from the camera. More... | |
| bool | getRgbFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the rgb camera. More... | |
| bool | setRgbFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the rgb camera. More... | |
| bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic) override |
| Get the intrinsic parameters of the rgb camera. More... | |
| bool | getRgbMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setRgbMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| int | getDepthHeight () override |
| Return the height of each frame. More... | |
| int | getDepthWidth () override |
| Return the height of each frame. More... | |
| bool | setDepthResolution (int width, int height) override |
| Set the resolution of the depth image from the camera. More... | |
| bool | getDepthFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the depth camera. More... | |
| bool | setDepthFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the depth camera. More... | |
| double | getDepthAccuracy () override |
| Get the minimum detectable variation in distance [meter]. More... | |
| bool | setDepthAccuracy (double accuracy) override |
| Set the minimum detectable variation in distance [meter] when possible. More... | |
| bool | getDepthClipPlanes (double &near, double &far) override |
| Get the clipping planes of the sensor. More... | |
| bool | setDepthClipPlanes (double near, double far) override |
| Set the clipping planes of the sensor. More... | |
| bool | getDepthIntrinsicParam (yarp::os::Property &intrinsic) override |
| Get the intrinsic parameters of the depth camera. More... | |
| bool | getDepthMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setDepthMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| bool | open (yarp::os::Searchable &config) override |
| Create and configure a device, by name. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | getExtrinsicParam (yarp::sig::Matrix &extrinsic) override |
| Get the extrinsic parameters from the device. More... | |
| IRGBDSensor::RGBDSensor_status | getSensorStatus () override |
| Get the surrent status of the sensor, using enum type. More... | |
| std::string | getLastErrorMsg (yarp::os::Stamp *timeStamp=nullptr) override |
| Return an error message in case of error. More... | |
| bool | getRgbImage (yarp::sig::FlexImage &rgbImage, yarp::os::Stamp *timeStamp=nullptr) override |
| Get the rgb frame from the device. More... | |
| bool | getDepthImage (yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthImage, yarp::os::Stamp *timeStamp=nullptr) override |
| Get the depth frame from the device. More... | |
| bool | getImages (yarp::sig::FlexImage &colorFrame, yarp::sig::ImageOf< yarp::sig::PixelFloat > &depthFrame, yarp::os::Stamp *colorStamp=nullptr, yarp::os::Stamp *depthStamp=nullptr) override |
| Get the both the color and depth frame in a single call. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::FrameGrabberControls_Sender | |
| FrameGrabberControls_Sender (yarp::os::Port &port) | |
| virtual | ~FrameGrabberControls_Sender () |
| bool | getCameraDescription (CameraDescriptor *camera) override |
| Get a basic description of the camera hw. More... | |
| bool | hasFeature (int feature, bool *hasFeature) override |
| Check if camera has the requested feature (saturation, brightness ... More... | |
| bool | setFeature (int feature, double value) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| bool | getFeature (int feature, double *value) override |
| Get the current value for the requested feature. More... | |
| bool | setFeature (int feature, double value1, double value2) override |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| bool | getFeature (int feature, double *value1, double *value2) override |
| Get the current value for the requested feature. More... | |
| bool | hasOnOff (int feature, bool *HasOnOff) override |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| bool | setActive (int feature, bool onoff) override |
| Set the requested feature on or off. More... | |
| bool | getActive (int feature, bool *isActive) override |
| Get the current status of the feature, on or off. More... | |
| bool | hasAuto (int feature, bool *hasAuto) override |
| Check if the requested feature has the 'auto' mode. More... | |
| bool | hasManual (int feature, bool *hasManual) override |
| Check if the requested feature has the 'manual' mode. More... | |
| bool | hasOnePush (int feature, bool *hasOnePush) override |
| Check if the requested feature has the 'onePush' mode. More... | |
| bool | setMode (int feature, FeatureMode mode) override |
| Set the requested mode for the feature. More... | |
| bool | getMode (int feature, FeatureMode *mode) override |
| Get the current mode for the feature. More... | |
| bool | setOnePush (int feature) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| Public Member Functions inherited from yarp::dev::IFrameGrabberControls | |
| virtual | ~IFrameGrabberControls () |
| Destructor. More... | |
| virtual bool | setBrightness (double v) |
| Set the brightness. More... | |
| virtual bool | setExposure (double v) |
| Set the exposure. More... | |
| virtual bool | setSharpness (double v) |
| Set the sharpness. More... | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set the white balance for the frame grabber. More... | |
| virtual bool | setHue (double v) |
| Set the hue. More... | |
| virtual bool | setSaturation (double v) |
| Set the saturation. More... | |
| virtual bool | setGamma (double v) |
| Set the gamma. More... | |
| virtual bool | setShutter (double v) |
| Set the shutter parameter. More... | |
| virtual bool | setGain (double v) |
| Set the gain. More... | |
| virtual bool | setIris (double v) |
| Set the iris. More... | |
| virtual double | getBrightness () |
| Read the brightness parameter. More... | |
| virtual double | getExposure () |
| Read the exposure parameter. More... | |
| virtual double | getSharpness () |
| Read the sharpness parameter. More... | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Read the white balance parameters. More... | |
| virtual double | getHue () |
| Read the hue parameter. More... | |
| virtual double | getSaturation () |
| Read the saturation parameter. More... | |
| virtual double | getGamma () |
| Read the gamma parameter. More... | |
| virtual double | getShutter () |
| Read the shutter parameter. More... | |
| virtual double | getGain () |
| Read the gain parameter. More... | |
| virtual double | getIris () |
| Read the iris parameter. More... | |
| cameraFeature_id_t | featureVOCABEnum (int vocab) |
| int | featureEnum2Vocab (cameraFeature_id_t _enum) |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
| Public Member Functions inherited from yarp::dev::IRGBDSensor | |
| virtual | ~IRGBDSensor () |
| Public Member Functions inherited from yarp::dev::IRgbVisualParams | |
| virtual | ~IRgbVisualParams () |
| Public Member Functions inherited from yarp::dev::IDepthVisualParams | |
| virtual | ~IDepthVisualParams () |
Protected Member Functions | |
| bool | initialize_YARP (yarp::os::Searchable &config) |
| bool | fromConfig (yarp::os::Searchable &config) |
Protected Attributes | |
| yarp::os::Port | rpcPort |
| std::string | local_colorFrame_StreamingPort_name |
| std::string | local_depthFrame_StreamingPort_name |
| std::string | remote_colorFrame_StreamingPort_name |
| std::string | remote_depthFrame_StreamingPort_name |
| std::string | image_carrier_type |
| std::string | depth_carrier_type |
| RgbImageBufferedPort | colorFrame_StreamingPort |
| FloatImageBufferedPort | depthFrame_StreamingPort |
| std::string | local_rpcPort_name |
| std::string | remote_rpcPort_name |
| std::string | sensorId |
| yarp::dev::IRGBDSensor * | sensor_p {nullptr} |
| IRGBDSensor::RGBDSensor_status | sensorStatus {IRGBDSensor::RGBD_SENSOR_NOT_READY} |
| int | verbose {2} |
| yarp::os::Stamp | colorStamp |
| yarp::os::Stamp | depthStamp |
| RGBDSensor_StreamingMsgParser * | streamingReader {nullptr} |
Additional Inherited Members | |
| Public Types inherited from yarp::dev::IRGBDSensor | |
| enum | RGBDSensor_status { RGBD_SENSOR_NOT_READY = 0, RGBD_SENSOR_OK_STANBY = 1, RGBD_SENSOR_OK_IN_USE = 2, RGB_SENSOR_ERROR = 3, DEPTH_SENSOR_ERROR = 4, RGBD_SENSOR_GENERIC_ERROR = 5, RGBD_SENSOR_TIMEOUT = 6 } |
RGBDSensorClient: A Network client to receive data from kinect-like devices. This device will read from two streams of data through different ports, one for the color frame and the other one for depth image following Framegrabber and IDepthSensor interfaces specification respectively. See they documentation for more details about each interface.
This device is paired with its server called RGBDSensorWrapper to receive the data streams and perform remote operations.
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| localImagePort | - | string | - | - | Full name of the local port to open, e.g. /myApp/RGBD/rgb_camera:i | ||
| localDepthPort | - | string | - | - | Full name of the local port to open, e.g. /myApp/RGBD/depth_camera:i | ||
| localRpcPort | - | string | - | - | Full name of the local RPC port to open, e.g. /myApp/RGBD/rpc | ||
| remoteImagePort | - | string | - | - | Full name of the port to read color images from, e.g. /robotName/RGBD/image_camera:o | ||
| remoteDepthPort | - | string | - | - | Full name of the port to read depth images from, e.g. /robotName/RGBD/depth_camera:o | ||
| remoteRpcPort | - | string | - | - | Full name of the remote RPC port, e.g. /robotName/RGBD/rpc | ||
| ImageCarrier | - | string | - | udp | No | Carrier name for the Image stream used in the client-server connection | |
| DepthCarrier | - | string | - | udp | No | Carrier name for the Depth strean used in the client-server connection |
Configuration file using .ini format, using subdevice keyword.
XML format, using 'networks' keyword. This file is meant to be used in junction with yarprobotinterface executable, therefore has an addictional section at the end.
Definition at line 84 of file RGBDSensorClient.h.
| RGBDSensorClient::RGBDSensorClient | ( | ) |
Definition at line 26 of file RGBDSensorClient.cpp.
|
delete |
|
delete |
|
override |
Definition at line 34 of file RGBDSensorClient.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 253 of file RGBDSensorClient.cpp.
|
protected |
Definition at line 66 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the minimum detectable variation in distance [meter].
Implements yarp::dev::IRGBDSensor.
Definition at line 424 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the clipping planes of the sensor.
| nearPlane | minimum distance at which the sensor start measuring. Object closer than this distance will not be detected. |
| farPlane | maximum distance beyond which the sensor stop measuring. Object farther than this distance will not be detected. |
Implements yarp::dev::IRGBDSensor.
Definition at line 434 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the field of view (FOV) of the depth camera.
| horizontalFov | will return the value of the horizontal fov in degrees |
| verticalFov | will return the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 414 of file RGBDSensorClient.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 399 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the depth frame from the device.
The pixel type of the source image will usually be set as a VOCAB_PIXEL_RGB, but the user can call the function with the pixel type of his/her choice. The conversion if possible, will be done automatically on client side (TO BO VERIFIED). Note: this will consume CPU power because it will not use GPU optimization. Use VOCAB_PIXEL_RGB for best performances.
| rgbImage | the image to be filled. |
| timeStamp | time in which the image was acquired. Optional, the user must provide memory allocation |
Implements yarp::dev::IRGBDSensor.
Definition at line 326 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the intrinsic parameters of the depth camera.
| intrinsic | return a Property containing intrinsic parameters of the optical model of the camera. |
The yarp::os::Property describing the intrinsic parameters is expected to be in the form:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| physFocalLength | - | double | m | - | Yes | Physical focal length of the lens in meters | |
| focalLengthX | - | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |
| focalLengthY | - | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |
| principalPointX | - | double | pixel | - | Yes | X coordinate of the principal point | |
| principalPointY | - | double | pixel | - | Yes | Y coordinate of the principal point | |
| retificationMatrix | - | 4x4 double matrix | - | - | Yes | Matrix that describes the lens' distortion | |
| distortionModel | - | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'cameraDistortionModelGroup' | This is another group's name to be searched for in the config file |
| cameraDistortionModelGroup | |||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | |
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| t1 | double | - | - | Yes | Tangential distortion of the lens | ||
| t2 | double | - | - | Yes | Tangential distortion of the lens |
Implements yarp::dev::IRGBDSensor.
Definition at line 444 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the mirroring setting of the sensor.
| mirror | true if image is mirrored, false otherwise |
Implements yarp::dev::IDepthVisualParams.
Definition at line 449 of file RGBDSensorClient.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 404 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the extrinsic parameters from the device.
| extrinsic | return a rototranslation matrix describing the position of the depth optical frame with respect to the rgb frame |
Implements yarp::dev::IRGBDSensor.
Definition at line 278 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the both the color and depth frame in a single call.
Implementation should assure the best possible synchronization is achieved accordingly to synch policy set by the user. TimeStamps are referred to acquisition time of the corresponding piece of information. If the device is not providing TimeStamps, then 'timeStamp' field should be set to '-1'.
| colorFrame | pointer to FlexImage data to hold the color frame from the sensor |
| depthFrame | pointer to FlexImage data to hold the depth frame from the sensor |
| colorStamp | pointer to memory to hold the Stamp of the color frame |
| depthStamp | pointer to memory to hold the Stamp of the depth frame |
Implements yarp::dev::IRGBDSensor.
Definition at line 331 of file RGBDSensorClient.cpp.
|
overridevirtual |
Return an error message in case of error.
For debugging purpose and user notification. Error message will be reset after any successful command
Implements yarp::dev::IRGBDSensor.
Definition at line 310 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the field of view (FOV) of the rgb camera.
| horizontalFov | will return the value of the horizontal fov in degrees |
| verticalFov | will return the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 371 of file RGBDSensorClient.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 346 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the rgb frame from the device.
The pixel type of the source image will usually be set as a VOCAB_PIXEL_RGB, but the user can call the function with the pixel type of his/her choice. The conversion if possible, will be done automatically on client side (TO BO VERIFIED). Note: this will consume CPU power because it will not use GPU optimization. Use VOCAB_PIXEL_RGB for best performances.
| rgbImage | the image to be filled. |
| timeStamp | time in which the image was acquired. Optional, the user must provide memory allocation |
Implements yarp::dev::IRGBDSensor.
Definition at line 321 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the intrinsic parameters of the rgb camera.
| intrinsic | return a Property containing intrinsic parameters of the optical model of the camera. |
The yarp::os::Property describing the intrinsic parameters is expected to be in the form:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| physFocalLength | - | double | m | - | Yes | Physical focal length of the lens in meters | |
| focalLengthX | - | double | pixel | - | Yes | Horizontal component of the focal length as a multiple of pixel width | |
| focalLengthY | - | double | pixel | - | Yes | Vertical component of the focal length as a multiple of pixel height | |
| principalPointX | - | double | pixel | - | Yes | X coordinate of the principal point | |
| principalPointY | - | double | pixel | - | Yes | Y coordinate of the principal point | |
| retificationMatrix | - | 4x4 double matrix | - | - | Yes | Matrix that describes the lens' distortion | |
| distortionModel | - | string | - | - | Yes | Reference to group of parameters describing the distortion model of the camera, example 'cameraDistortionModelGroup' | This is another group's name to be searched for in the config file |
| cameraDistortionModelGroup | |||||||
| name | string | - | - | Yes | Name of the distortion model, see notes | right now only 'plumb_bob' is supported | |
| k1 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k2 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| k3 | double | - | - | Yes | Radial distortion coefficient of the lens | ||
| t1 | double | - | - | Yes | Tangential distortion of the lens | ||
| t2 | double | - | - | Yes | Tangential distortion of the lens |
Implements yarp::dev::IRGBDSensor.
Definition at line 381 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the mirroring setting of the sensor.
| mirror | true if image is mirrored, false otherwise |
Implements yarp::dev::IRgbVisualParams.
Definition at line 386 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Reimplemented from yarp::dev::IRGBDSensor.
Definition at line 361 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the possible configurations of the camera.
| configurations | list of camera supported configurations as CameraConfig type |
Reimplemented from yarp::dev::IRGBDSensor.
Definition at line 356 of file RGBDSensorClient.cpp.
|
overridevirtual |
Return the width of each frame.
Implements yarp::dev::IRGBDSensor.
Definition at line 351 of file RGBDSensorClient.cpp.
|
overridevirtual |
Get the surrent status of the sensor, using enum type.
Implements yarp::dev::IRGBDSensor.
Definition at line 298 of file RGBDSensorClient.cpp.
|
protected |
Definition at line 152 of file RGBDSensorClient.cpp.
|
overridevirtual |
Create and configure a device, by name.
The config object should have a property called "device" that is set to the common name of the device. All other properties are passed on the the device's DeviceDriver::open method.
| config | configuration options for the device |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 42 of file RGBDSensorClient.cpp.
|
delete |
|
delete |
|
overridevirtual |
Set the minimum detectable variation in distance [meter] when possible.
| the | desired resolution in meters. |
Implements yarp::dev::IRGBDSensor.
Definition at line 429 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the clipping planes of the sensor.
| nearPlane | minimum distance at which the sensor start measuring. Object closer than this distance will not be detected. |
| farPlane | maximum distance beyond which the sensor stop measuring. Object farther than this distance will not be detected. |
Implements yarp::dev::IRGBDSensor.
Definition at line 439 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the field of view (FOV) of the depth camera.
| horizontalFov | will set the value of the horizontal fov in degrees |
| verticalFov | will set the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 419 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the mirroring setting of the sensor.
| mirror | true if image should be mirrored, false otherwise |
Implements yarp::dev::IDepthVisualParams.
Definition at line 454 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the resolution of the depth image from the camera.
| width | image width |
| height | image height |
Implements yarp::dev::IRGBDSensor.
Definition at line 409 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the field of view (FOV) of the rgb camera.
| horizontalFov | will set the value of the horizontal fov in degrees |
| verticalFov | will set the value of the vertical fov in degrees |
Implements yarp::dev::IRGBDSensor.
Definition at line 376 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the mirroring setting of the sensor.
| mirror | true if image should be mirrored, false otherwise |
Implements yarp::dev::IRgbVisualParams.
Definition at line 391 of file RGBDSensorClient.cpp.
|
overridevirtual |
Set the resolution of the rgb image from the camera.
| width | image width |
| height | image height |
Implements yarp::dev::IRGBDSensor.
Definition at line 366 of file RGBDSensorClient.cpp.
|
protected |
Definition at line 102 of file RGBDSensorClient.h.
|
protected |
Definition at line 135 of file RGBDSensorClient.h.
|
protected |
Definition at line 100 of file RGBDSensorClient.h.
|
protected |
Definition at line 103 of file RGBDSensorClient.h.
|
protected |
Definition at line 136 of file RGBDSensorClient.h.
|
protected |
Definition at line 99 of file RGBDSensorClient.h.
|
protected |
Definition at line 95 of file RGBDSensorClient.h.
|
protected |
Definition at line 96 of file RGBDSensorClient.h.
|
protected |
Definition at line 106 of file RGBDSensorClient.h.
|
protected |
Definition at line 97 of file RGBDSensorClient.h.
|
protected |
Definition at line 98 of file RGBDSensorClient.h.
|
protected |
Definition at line 107 of file RGBDSensorClient.h.
|
protected |
Definition at line 90 of file RGBDSensorClient.h.
|
protected |
Definition at line 129 of file RGBDSensorClient.h.
|
protected |
Definition at line 128 of file RGBDSensorClient.h.
|
protected |
Definition at line 130 of file RGBDSensorClient.h.
|
protected |
Definition at line 140 of file RGBDSensorClient.h.
|
protected |
Definition at line 131 of file RGBDSensorClient.h.