|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
ILocalization2D interface. More...
#include <yarp/dev/ILocalization2D.h>
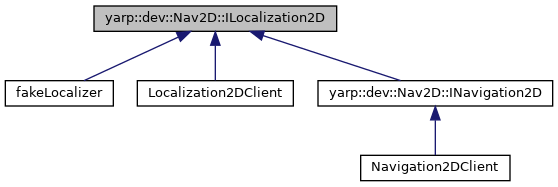
 Inheritance diagram for yarp::dev::Nav2D::ILocalization2D:
Inheritance diagram for yarp::dev::Nav2D::ILocalization2D:Public Member Functions | |
| virtual | ~ILocalization2D () |
| Destructor. More... | |
| virtual bool | startLocalizationService ()=0 |
| Starts the localization service. More... | |
| virtual bool | stopLocalizationService ()=0 |
| Stops the localization service. More... | |
| virtual bool | getLocalizationStatus (LocalizationStatusEnum &status)=0 |
| Gets the current status of the localization task. More... | |
| virtual bool | getEstimatedPoses (std::vector< yarp::dev::Nav2D::Map2DLocation > &poses)=0 |
| Gets a set of pose estimates computed by the localization algorithm. More... | |
| virtual bool | getCurrentPosition (yarp::dev::Nav2D::Map2DLocation &loc)=0 |
| Gets the current position of the robot w.r.t world reference frame. More... | |
| virtual bool | getCurrentPosition (yarp::dev::Nav2D::Map2DLocation &loc, yarp::sig::Matrix &cov)=0 |
| Gets the current position of the robot w.r.t world reference frame, plus the covariance. More... | |
| virtual bool | getEstimatedOdometry (yarp::dev::OdometryData &odom)=0 |
| Gets the estimated odometry the robot, including its velocity expressed in the world and in the local reference frame. More... | |
| virtual bool | setInitialPose (const yarp::dev::Nav2D::Map2DLocation &loc)=0 |
| Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame. More... | |
| virtual bool | setInitialPose (const yarp::dev::Nav2D::Map2DLocation &loc, const yarp::sig::Matrix &cov)=0 |
| Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame. More... | |
ILocalization2D interface.
Provides methods to obtain the pose of the robot in a known map.
Definition at line 39 of file ILocalization2D.h.
|
inlinevirtualdefault |
Destructor.
Definition at line 45 of file ILocalization2D.h.
|
pure virtual |
Gets the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Gets the current position of the robot w.r.t world reference frame, plus the covariance.
| loc | the location of the robot |
| cov | the 3x3 covariance matrix |
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Gets the estimated odometry the robot, including its velocity expressed in the world and in the local reference frame.
| loc | the estimated odometry. |
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Gets a set of pose estimates computed by the localization algorithm.
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Gets the current status of the localization task.
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Sets the initial pose for the localization algorithm which estimates the current position of the robot w.r.t world reference frame.
| loc | the location of the robot |
| cov | the 3x3 covariance matrix |
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Starts the localization service.
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.
|
pure virtual |
Stops the localization service.
Implemented in Navigation2DClient, Localization2DClient, and fakeLocalizer.