|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
A port specialized for reading data of a constant type published on a topic. More...
#include <yarp/os/Subscriber.h>
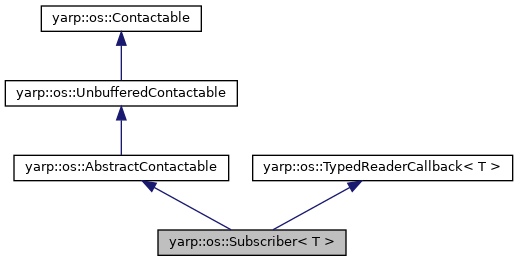
 Inheritance diagram for yarp::os::Subscriber< T >:
Inheritance diagram for yarp::os::Subscriber< T >:Public Member Functions | |
| Subscriber (const std::string &name="") | |
| Constructor. More... | |
| virtual | ~Subscriber () |
| Destructor. More... | |
| bool | topic (const std::string &name) |
| Set topic to subscribe to. More... | |
| bool | open (const std::string &name) override |
| Start port operation, with a specific name, with automatically-chosen network parameters. More... | |
| bool | open (const Contact &contact, bool registerName=true) override |
| Start port operation with user-chosen network parameters. More... | |
| void | close () override |
| Stop port activity. More... | |
| void | interrupt () override |
| Interrupt any current reads or writes attached to the port. More... | |
| void | resume () override |
| Put the port back in an operative state after interrupt() has been called. More... | |
| void | setReader (PortReader &reader) override |
| Set an external reader for port data. More... | |
| T * | read (bool shouldWait=true) |
| Read a message from the port. More... | |
| Port & | asPort () override |
| Get the concrete Port being used for communication. More... | |
| const Port & | asPort () const override |
| Get the concrete Port being used for communication, const version. More... | |
| void | onRead (T &datum) override |
| Callback method. More... | |
| void | useCallback (TypedReaderCallback< T > &callback) |
| void | useCallback () |
| void | disableCallback () |
| void | setStrict (bool strict=true) |
| bool | read (PortReader &reader, bool willReply=false) override |
| Public Member Functions inherited from yarp::os::AbstractContactable | |
| bool | addOutput (const std::string &name) override |
| Add an output connection to the specified port. More... | |
| bool | addOutput (const std::string &name, const std::string &carrier) override |
| Add an output connection to the specified port, using a specified carrier. More... | |
| bool | addOutput (const Contact &contact) override |
| Add an output connection to the specified port, using specified network parameters. More... | |
| Contact | where () const override |
| Returns information about how this port can be reached. More... | |
| std::string | getName () const override |
| Get name of port. More... | |
| bool | setEnvelope (PortWriter &envelope) override |
| Set an envelope (e.g., a timestamp) to the next message which will be sent. More... | |
| bool | getEnvelope (PortReader &envelope) override |
| Get the envelope information (e.g., a timestamp) from the last message received on the port. More... | |
| int | getInputCount () override |
| Determine how many connections are arriving into this port. More... | |
| int | getOutputCount () override |
| Determine how many output connections this port has. More... | |
| void | getReport (PortReport &reporter) override |
| Get information on the state of the port - connections etc. More... | |
| void | setReporter (PortReport &reporter) override |
| Set a callback to be called upon any future connections and disconnections to/from the port. More... | |
| void | resetReporter () override |
| Remove the callback which is called upon any future connections and disconnections to/from the port. More... | |
| bool | isWriting () override |
| Report whether the port is currently writing data. More... | |
| void | setAdminReader (PortReader &reader) override |
| Set an external reader for unrecognized administrative port messages. More... | |
| void | setInputMode (bool expectInput) override |
| Configure the port to allow or forbid inputs. More... | |
| void | setOutputMode (bool expectOutput) override |
| Configure the port to allow or forbid outputs. More... | |
| void | setRpcMode (bool expectRpc) override |
| Configure the port to be RPC only. More... | |
| Type | getType () override |
| Get the type of data the port has committed to send/receive. More... | |
| void | promiseType (const Type &typ) override |
| Commit the port to a particular type of data. More... | |
| Property * | acquireProperties (bool readOnly) override |
| Access unstructured port properties. More... | |
| void | releaseProperties (Property *prop) override |
| End access unstructured port properties. More... | |
| bool | write (const PortWriter &writer, const PortWriter *callback=nullptr) const override |
| Write an object to the port. More... | |
| bool | write (const PortWriter &writer, PortReader &reader, const PortWriter *callback=nullptr) const override |
| Write an object to the port, then expect one back. More... | |
| bool | read (PortReader &reader, bool willReply=false) override |
| Read an object from the port. More... | |
| bool | reply (PortWriter &writer) override |
| Send an object as a reply to an object read from the port. More... | |
| bool | replyAndDrop (PortWriter &writer) override |
| Same as reply(), but closes connection after reply. More... | |
| void | includeNodeInName (bool flag) override |
| Choose whether to prepend a node name (if one is available) to the port's name. More... | |
| bool | setCallbackLock (yarp::os::Mutex *mutex) override |
| Add a lock to use when invoking callbacks. More... | |
| bool | setCallbackLock (std::mutex *mutex=nullptr) override |
| Add a lock to use when invoking callbacks. More... | |
| bool | removeCallbackLock () override |
| Remove a lock on callbacks added with setCallbackLock() More... | |
| bool | lockCallback () override |
| Lock callbacks until unlockCallback() is called. More... | |
| bool | tryLockCallback () override |
| Try to lock callbacks until unlockCallback() is called. More... | |
| void | unlockCallback () override |
| Unlock callbacks. More... | |
| Public Member Functions inherited from yarp::os::Contactable | |
| virtual | ~Contactable () |
| Destructor. More... | |
| void | setReadOnly () |
| Shorthand for setInputMode(true), setOutputMode(false), setRpcMode(false) More... | |
| void | setWriteOnly () |
| Shorthand for setInputMode(false), setOutputMode(true), setRpcMode(false) More... | |
| void | setRpcServer () |
| Shorthand for setInputMode(true), setOutputMode(false), setRpcMode(true) More... | |
| void | setRpcClient () |
| Shorthand for setInputMode(false), setOutputMode(true), setRpcMode(true) More... | |
| Public Member Functions inherited from yarp::os::TypedReaderCallback< T > | |
| virtual | ~TypedReaderCallback () |
| Destructor. More... | |
| virtual void | onRead (T &datum, const yarp::os::TypedReader< T > &reader) |
| Callback method. More... | |
A port specialized for reading data of a constant type published on a topic.
Definition at line 25 of file Subscriber.h.
|
inline |
Constructor.
| name | optional topic name to publish to. |
Definition at line 35 of file Subscriber.h.
|
inlinevirtual |
Destructor.
Definition at line 54 of file Subscriber.h.
|
inlineoverridevirtual |
Get the concrete Port being used for communication, const version.
Implements yarp::os::AbstractContactable.
Definition at line 127 of file Subscriber.h.
|
inlineoverridevirtual |
Get the concrete Port being used for communication.
Implements yarp::os::AbstractContactable.
Definition at line 122 of file Subscriber.h.
|
inlineoverridevirtual |
Stop port activity.
Reimplemented from yarp::os::AbstractContactable.
Definition at line 87 of file Subscriber.h.
|
inline |
Definition at line 149 of file Subscriber.h.
|
inlineoverridevirtual |
Interrupt any current reads or writes attached to the port.
This is useful prior to calling close(), if there are multiple threads operating on the port. Any reads or writes after the call to interrupt() will fail - unless resume() is called.
Reimplemented from yarp::os::AbstractContactable.
Definition at line 93 of file Subscriber.h.
|
inlineoverridevirtual |
Callback method.
| datum | data read from a port |
Reimplemented from yarp::os::TypedReaderCallback< T >.
Definition at line 133 of file Subscriber.h.
|
inlineoverridevirtual |
Start port operation with user-chosen network parameters.
Contact information is supplied by the user rather than the name server. If the Contact information is incomplete, the name server is used to complete it (set registerName to false if you don't want name server help).
Reimplemented from yarp::os::AbstractContactable.
Definition at line 80 of file Subscriber.h.
|
inlineoverridevirtual |
Start port operation, with a specific name, with automatically-chosen network parameters.
The port is registered with the given name, and allocated network resources, by communicating with the YARP name server.
Reimplemented from yarp::os::AbstractContactable.
Definition at line 73 of file Subscriber.h.
|
inline |
Read a message from the port.
Waits by default. May return nullptr if the port status has changed.
| shouldWait | false if the call should return immediately if no message is available |
Definition at line 117 of file Subscriber.h.
|
override |
Definition at line 132 of file AbstractContactable.cpp.
|
inlineoverridevirtual |
Put the port back in an operative state after interrupt() has been called.
Reimplemented from yarp::os::AbstractContactable.
Definition at line 99 of file Subscriber.h.
|
inlineoverridevirtual |
Set an external reader for port data.
| reader | the external reader to use |
Reimplemented from yarp::os::AbstractContactable.
Definition at line 105 of file Subscriber.h.
|
inline |
Definition at line 154 of file Subscriber.h.
|
inline |
Set topic to subscribe to.
| name | topic name |
Definition at line 66 of file Subscriber.h.
|
inline |
Definition at line 144 of file Subscriber.h.
|
inline |
Definition at line 139 of file Subscriber.h.