|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
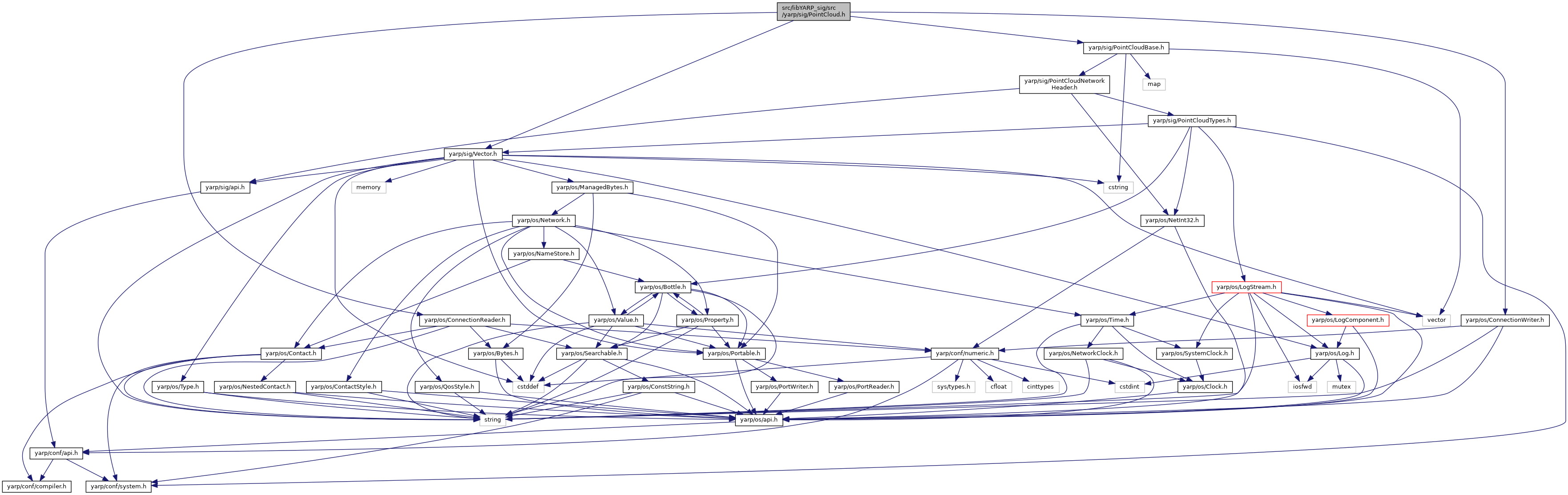
#include <yarp/sig/Vector.h>#include <yarp/sig/PointCloudBase.h>#include <yarp/os/ConnectionReader.h>#include <yarp/os/ConnectionWriter.h> Include dependency graph for PointCloud.h: This graph shows which files directly or indirectly include this file:
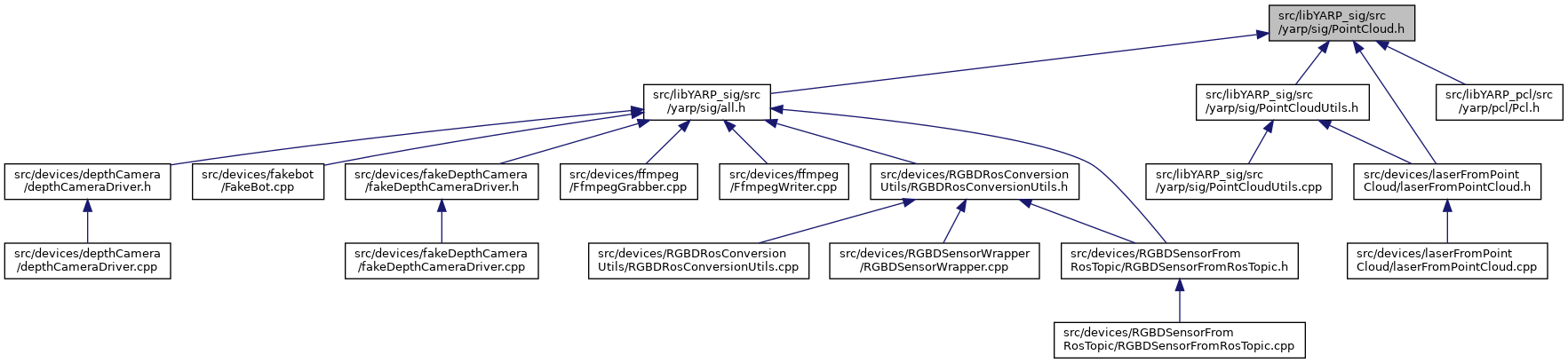
Include dependency graph for PointCloud.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | yarp::sig::PointCloud< T > |
| The PointCloud class. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::sig | |
| Signal processing. | |
Typedefs | |
| using | yarp::sig::PointCloudXY = PointCloud< DataXY > |
| using | yarp::sig::PointCloudXYZ = PointCloud< DataXYZ > |
| using | yarp::sig::PointCloudNormal = PointCloud< DataNormal > |
| using | yarp::sig::PointCloudXYZRGBA = PointCloud< DataXYZRGBA > |
| using | yarp::sig::PointCloudXYZI = PointCloud< DataXYZI > |
| using | yarp::sig::PointCloudInterestPointXYZ = PointCloud< DataInterestPointXYZ > |
| using | yarp::sig::PointCloudXYZNormal = PointCloud< DataXYZNormal > |
| using | yarp::sig::PointCloudXYZNormalRGBA = PointCloud< DataXYZNormalRGBA > |
Functions | |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXY > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXYZ > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataNormal > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXYZRGBA > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXYZI > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataInterestPointXYZ > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXYZNormal > () |
| template<> | |
| int | BottleTagMap< yarp::sig::DataXYZNormalRGBA > () |
|
inline |
Definition at line 494 of file PointCloud.h.
|
inline |
Definition at line 476 of file PointCloud.h.
|
inline |
Definition at line 464 of file PointCloud.h.
|
inline |
Definition at line 470 of file PointCloud.h.
|
inline |
Definition at line 488 of file PointCloud.h.
|
inline |
Definition at line 500 of file PointCloud.h.
|
inline |
Definition at line 506 of file PointCloud.h.
|
inline |
Definition at line 482 of file PointCloud.h.