#include <yarp/os/Node.h>
#include <yarp/conf/compiler.h>
#include <yarp/conf/environment.h>
#include <yarp/os/NestedContact.h>
#include <yarp/os/Network.h>
#include <yarp/os/Os.h>
#include <yarp/os/Port.h>
#include <yarp/os/PortInfo.h>
#include <yarp/os/PortReport.h>
#include <yarp/os/RosNameSpace.h>
#include <yarp/os/Type.h>
#include <yarp/os/impl/LogComponent.h>
#include <yarp/os/impl/NameClient.h>
#include <algorithm>
#include <cstdlib>
#include <list>
#include <map>
#include <vector>
#include <mutex>
Go to the source code of this file.
|
| static std::string | toRosName (const std::string &str) |
| |
| static std::string | fromRosName (const std::string &str) |
| |
◆ fromRosName()
| static std::string fromRosName |
( |
const std::string & |
str | ) |
|
|
static |
◆ toRosName()
| static std::string toRosName |
( |
const std::string & |
str | ) |
|
|
static |



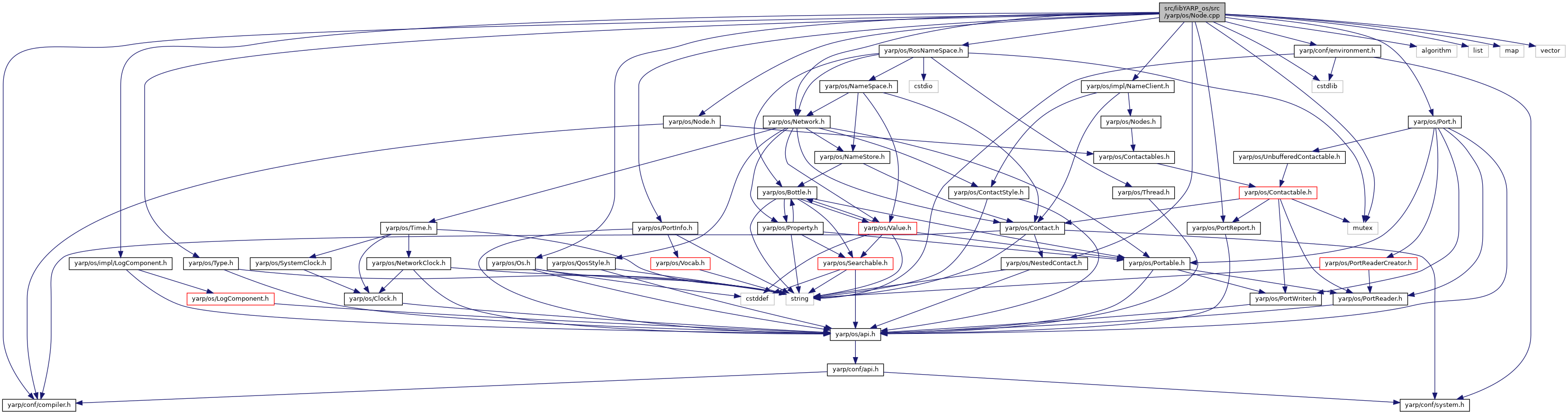
 Include dependency graph for Node.cpp:
Include dependency graph for Node.cpp: