|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
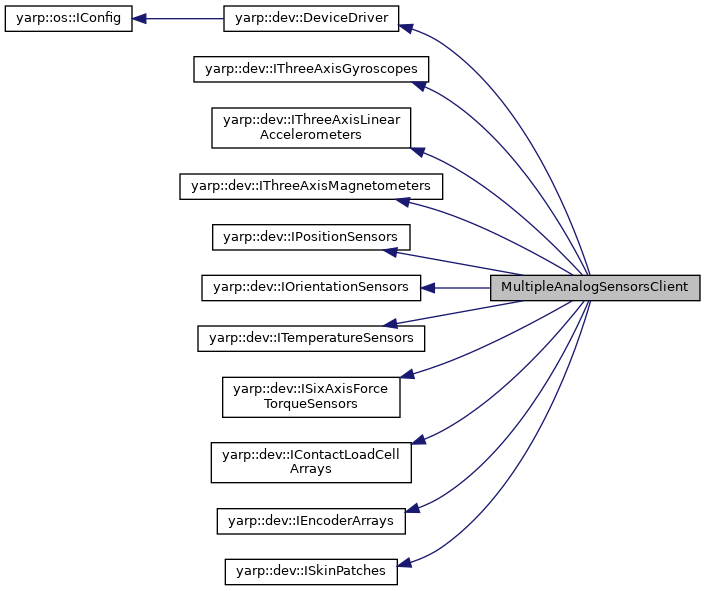
multipleanalogsensorsclient: The client side of a device exposing MultipleAnalogSensors interfaces.
More...
#include <multipleanalogsensorsclient/MultipleAnalogSensorsClient.h>
 Inheritance diagram for MultipleAnalogSensorsClient:
Inheritance diagram for MultipleAnalogSensorsClient:Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| size_t | getNrOfThreeAxisGyroscopes () const override |
| Get the number of three axis gyroscopes exposed by this sensor. More... | |
| yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the gyroscope. More... | |
| size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| Get the number of three axis linear accelerometers exposed by this device. More... | |
| yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfThreeAxisMagnetometers () const override |
| Get the number of magnetometers exposed by this device. More... | |
| yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfPositionSensors () const override |
| Get the number of position sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getPositionSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getPositionSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getPositionSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getPositionSensorMeasure (size_t sens_index, yarp::sig::Vector &xyz, double ×tamp) const override |
| Get the last reading of the position sensor as x y z. More... | |
| size_t | getNrOfOrientationSensors () const override |
| Get the number of orientation sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getOrientationSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getOrientationSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getOrientationSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getOrientationSensorMeasureAsRollPitchYaw (size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| Get the last reading of the orientation sensor as roll pitch yaw. More... | |
| size_t | getNrOfTemperatureSensors () const override |
| Get the number of temperature sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getTemperatureSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getTemperatureSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getTemperatureSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getTemperatureSensorMeasure (size_t sens_index, double &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| bool | getTemperatureSensorMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfSixAxisForceTorqueSensors () const override |
| Get the number of six axis force torque sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getSixAxisForceTorqueSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorFrameName (size_t sens_index, std::string &frame) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfContactLoadCellArrays () const override |
| Get the number of contact load cell array exposed by this device. More... | |
| yarp::dev::MAS_status | getContactLoadCellArrayStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getContactLoadCellArrayName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getContactLoadCellArrayMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getContactLoadCellArraySize (size_t sens_index) const override |
| Get the size of the specified contact load cell array. More... | |
| size_t | getNrOfEncoderArrays () const override |
| Get the number of encoder arrays exposed by this device. More... | |
| yarp::dev::MAS_status | getEncoderArrayStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getEncoderArrayName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getEncoderArrayMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getEncoderArraySize (size_t sens_index) const override |
| Get the size of the specified encoder array. More... | |
| size_t | getNrOfSkinPatches () const override |
| Get the number of skin patches exposed by this device. More... | |
| yarp::dev::MAS_status | getSkinPatchStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getSkinPatchName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getSkinPatchMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getSkinPatchSize (size_t sens_index) const override |
| Get the size of the specified skin patch. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IThreeAxisGyroscopes | |
| virtual | ~IThreeAxisGyroscopes () |
| Public Member Functions inherited from yarp::dev::IThreeAxisLinearAccelerometers | |
| virtual | ~IThreeAxisLinearAccelerometers () |
| Public Member Functions inherited from yarp::dev::IThreeAxisMagnetometers | |
| virtual | ~IThreeAxisMagnetometers () |
| Public Member Functions inherited from yarp::dev::IPositionSensors | |
| virtual | ~IPositionSensors () |
| Public Member Functions inherited from yarp::dev::IOrientationSensors | |
| virtual | ~IOrientationSensors () |
| Public Member Functions inherited from yarp::dev::ITemperatureSensors | |
| virtual | ~ITemperatureSensors () |
| Public Member Functions inherited from yarp::dev::ISixAxisForceTorqueSensors | |
| virtual | ~ISixAxisForceTorqueSensors () |
| Public Member Functions inherited from yarp::dev::IContactLoadCellArrays | |
| virtual | ~IContactLoadCellArrays () |
| Public Member Functions inherited from yarp::dev::IEncoderArrays | |
| virtual | ~IEncoderArrays () |
| Public Member Functions inherited from yarp::dev::ISkinPatches | |
| virtual | ~ISkinPatches () |
multipleanalogsensorsclient: The client side of a device exposing MultipleAnalogSensors interfaces.
| YARP device name |
|---|
multipleanalogsensorsclient |
The parameters accepted by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| remote | - | string | - | - | Yes | Prefix of the ports to which to connect, opened by MultipleAnalogSensorsServer device. | |
| local | - | string | - | - | Yes | Port prefix of the ports opened by this device. | |
| timeout | - | double | seconds | 0.01 | No | Timeout after which the device reports an error if no measurement was received. | |
| externalConnection | - | bool | - | false | No | If set to true, the connection to the rpc port of the MAS server is skipped and it is possible to connect to the data source externally after being opened | Use case: e.g yarpdataplayer source. Note that with this configuration some information like sensor name, frame name and sensor number will be not available. |
Definition at line 57 of file MultipleAnalogSensorsClient.h.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 144 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getContactLoadCellArrayMeasure()-1). |
| [out] | out | The requested measure. The vector should be getContactLoadCellArrayMeasure(sens_index)-dimensional. The measure is expressed in Newton. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 537 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 532 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the size of the specified contact load cell array.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 543 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 527 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfEncoderArrays()-1). |
| [out] | out | The requested measure. The vector should be getEncoderArraySize(sens_index)-dimensional. The measure is expressed in Newton. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IEncoderArrays.
Definition at line 565 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IEncoderArrays.
Definition at line 560 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the size of the specified encoder array.
Implements yarp::dev::IEncoderArrays.
Definition at line 571 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IEncoderArrays.
Definition at line 555 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of contact load cell array exposed by this device.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 521 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of encoder arrays exposed by this device.
Implements yarp::dev::IEncoderArrays.
Definition at line 549 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of orientation sensors exposed by this device.
Implements yarp::dev::IOrientationSensors.
Definition at line 406 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of position sensors exposed by this device.
Implements yarp::dev::IPositionSensors.
Definition at line 433 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of six axis force torque sensors exposed by this device.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 494 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of skin patches exposed by this device.
Implements yarp::dev::ISkinPatches.
Definition at line 577 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of temperature sensors exposed by this device.
Implements yarp::dev::ITemperatureSensors.
Definition at line 459 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of three axis gyroscopes exposed by this sensor.
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 325 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of three axis linear accelerometers exposed by this device.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 352 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the number of magnetometers exposed by this device.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 379 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 422 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the orientation sensor as roll pitch yaw.
If  is the lab or surface fixed frame, and
is the lab or surface fixed frame, and  is the sensor-fixed frame, this methods returns the angles
is the sensor-fixed frame, this methods returns the angles ![$ r \in [-180, 180] , p \in [-90, 90], y \in [-180, 180]$](form_2.png) such that
such that
![\[ {}^f R_s = RotZ\left(\frac{\pi}{180}y\right)*RotY\left(\frac{\pi}{180}p\right)*RotX\left(\frac{\pi}{180}r\right) \]](form_3.png)
with
![\[ RotZ(\theta) = \begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0 \\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \]](form_4.png)
,
![\[ RotY(\theta) = \begin{bmatrix} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta) \\ \end{bmatrix} \]](form_5.png)
and
![\[ RotX(\theta) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos(\theta) & - \sin(\theta) \\ 0 & \sin(\theta) & \cos(\theta) \\ \end{bmatrix} \]](form_6.png)
where  is the rotation that left-multiplied by a 3d column vector expressed in it returns it expressed in .
is the rotation that left-multiplied by a 3d column vector expressed in it returns it expressed in .
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfOrientationSensors()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in degrees . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IOrientationSensors.
Definition at line 427 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 417 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 412 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 449 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the position sensor as x y z.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfPositionSensors()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in meters. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IPositionSensors.
Definition at line 454 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 444 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 439 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 510 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfSixAxisForceTorqueSensors()-1). |
| [out] | out | The requested measure. The vector should be 6-dimensional. The measure is expressed in Newton for the first three elements, Newton Meters for the last three elements. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 515 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 505 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 500 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfSkinPatches()-1). |
| [out] | out | The requested measure. The vector should be getNrOfSkinPatches(sens_index)-dimensional. The measure is expressed in implementation-specific unit of measure. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ISkinPatches.
Definition at line 593 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ISkinPatches.
Definition at line 588 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the size of the specified skin patch.
Implements yarp::dev::ISkinPatches.
Definition at line 599 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ISkinPatches.
Definition at line 583 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 475 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
TODO(traversaro) : make the method swig-friendly
Implements yarp::dev::ITemperatureSensors.
Definition at line 486 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfTemperatureSensors()-1). |
| [out] | out | The requested measure. The vector should be 1-dimensional. The measure is expressed in celsius degrees . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ITemperatureSensors.
Definition at line 480 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 470 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 465 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 341 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the gyroscope.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in degrees/seconds. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 346 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 336 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 331 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 368 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisLinearAccelerometers()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in meters^2/seconds. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 373 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 363 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 358 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 395 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisMagnetometers()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in tesla . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 400 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 390 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 385 of file MultipleAnalogSensorsClient.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 43 of file MultipleAnalogSensorsClient.cpp.