|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
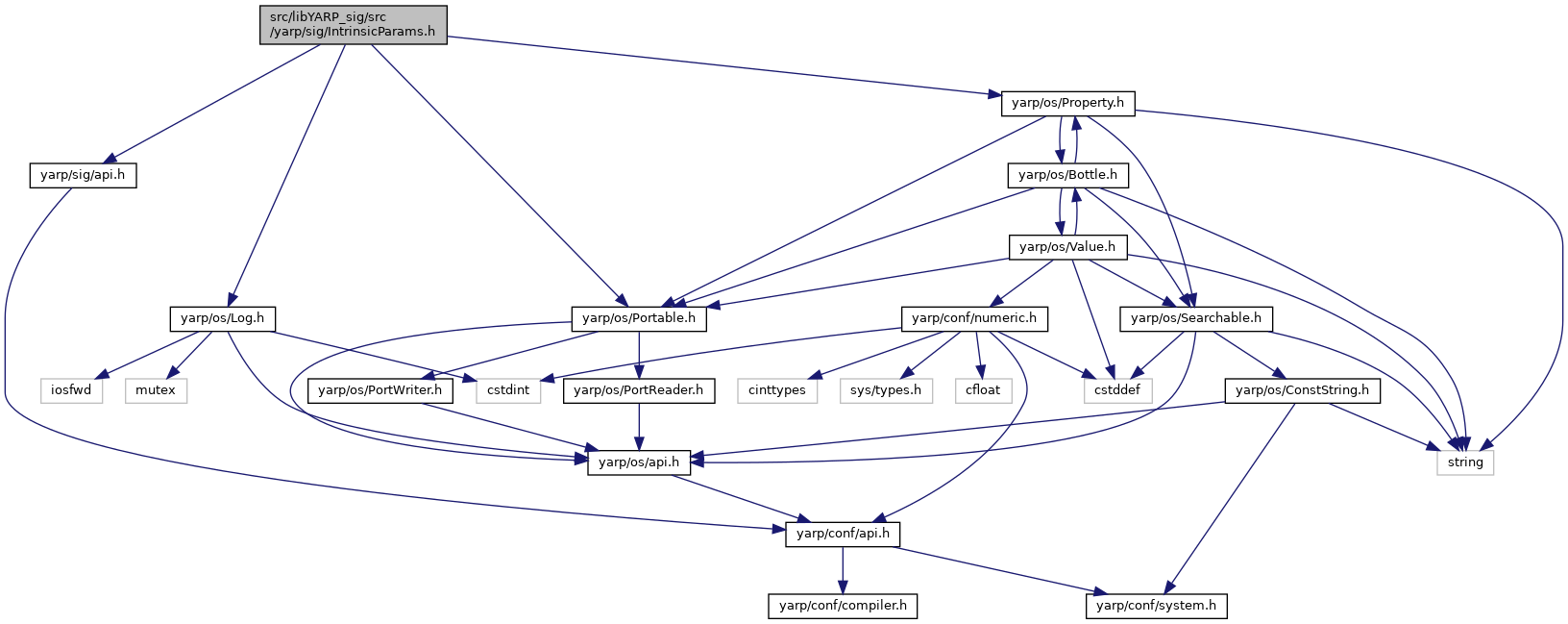
#include <yarp/os/Log.h>#include <yarp/os/Portable.h>#include <yarp/os/Property.h>#include <yarp/sig/api.h> Include dependency graph for IntrinsicParams.h: This graph shows which files directly or indirectly include this file:
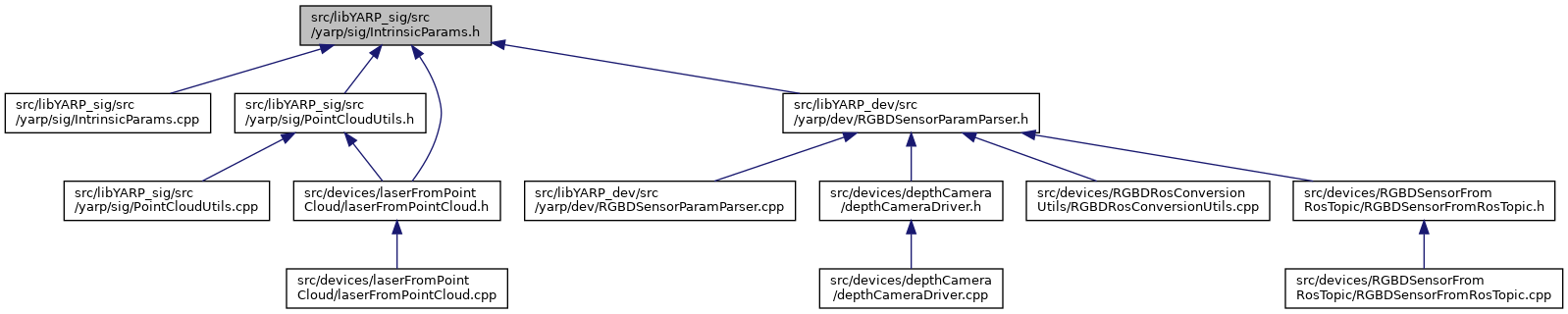
Include dependency graph for IntrinsicParams.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| struct | yarp::sig::IntrinsicParams |
| The IntrinsicParams struct to handle the intrinsic parameter of cameras(RGB and RGBD either). More... | |
| struct | yarp::sig::IntrinsicParams::DistortionModel |
| The DistortionModel struct representing the distortion model of the camera. More... | |
Namespaces | |
| yarp | |
| The main, catch-all namespace for YARP. | |
| yarp::sig | |
| Signal processing. | |
Enumerations | |
| enum | yarp::sig::YarpDistortion : std::int32_t { yarp::sig::YarpDistortion::YARP_DISTORTION_NONE, yarp::sig::YarpDistortion::YARP_PLUM_BOB, yarp::sig::YarpDistortion::YARP_FISH_EYE, yarp::sig::YarpDistortion::YARP_UNSUPPORTED, yarp::sig::YarpDistortion::YARP_DISTORTION_COUNT } |
| The YarpDistortion enum to define the type of the distortion model of the camera. More... | |