|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
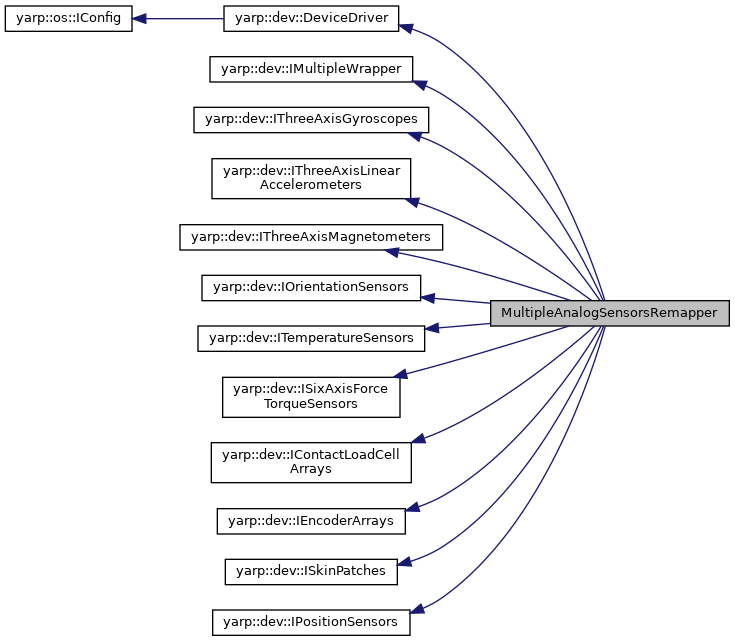
multipleanalogsensorsremapper : device that takes a list of sensor from multiple analog sensors device and expose them as a single device exposing MultipleAnalogSensors interface.
More...
#include <multipleanalogsensorsremapper/MultipleAnalogSensorsRemapper.h>
 Inheritance diagram for MultipleAnalogSensorsRemapper:
Inheritance diagram for MultipleAnalogSensorsRemapper:Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| Open the DeviceDriver. More... | |
| bool | close () override |
| Close the DeviceDriver. More... | |
| bool | attachAll (const yarp::dev::PolyDriverList &p) override |
| MultipeWrapper methods. More... | |
| bool | detachAll () override |
| Detach the object (you must have first called attach). More... | |
| size_t | getNrOfThreeAxisGyroscopes () const override |
| Get the number of three axis gyroscopes exposed by this sensor. More... | |
| yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisGyroscopeMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the gyroscope. More... | |
| size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| Get the number of three axis linear accelerometers exposed by this device. More... | |
| yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisLinearAccelerometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfThreeAxisMagnetometers () const override |
| Get the number of magnetometers exposed by this device. More... | |
| yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getThreeAxisMagnetometerMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfOrientationSensors () const override |
| Get the number of orientation sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getOrientationSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getOrientationSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getOrientationSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getOrientationSensorMeasureAsRollPitchYaw (size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| Get the last reading of the orientation sensor as roll pitch yaw. More... | |
| size_t | getNrOfTemperatureSensors () const override |
| Get the number of temperature sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getTemperatureSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getTemperatureSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getTemperatureSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getTemperatureSensorMeasure (size_t sens_index, double &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| bool | getTemperatureSensorMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfSixAxisForceTorqueSensors () const override |
| Get the number of six axis force torque sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getSixAxisForceTorqueSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorFrameName (size_t sens_index, std::string &frame) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getSixAxisForceTorqueSensorMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getNrOfContactLoadCellArrays () const override |
| Get the number of contact load cell array exposed by this device. More... | |
| yarp::dev::MAS_status | getContactLoadCellArrayStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getContactLoadCellArrayName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getContactLoadCellArrayMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getContactLoadCellArraySize (size_t sens_index) const override |
| Get the size of the specified contact load cell array. More... | |
| size_t | getNrOfEncoderArrays () const override |
| Get the number of encoder arrays exposed by this device. More... | |
| yarp::dev::MAS_status | getEncoderArrayStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getEncoderArrayName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getEncoderArrayMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getEncoderArraySize (size_t sens_index) const override |
| Get the size of the specified encoder array. More... | |
| size_t | getNrOfSkinPatches () const override |
| Get the number of skin patches exposed by this device. More... | |
| yarp::dev::MAS_status | getSkinPatchStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getSkinPatchName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getSkinPatchMeasure (size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| Get the last reading of the specified sensor. More... | |
| size_t | getSkinPatchSize (size_t sens_index) const override |
| Get the size of the specified skin patch. More... | |
| size_t | getNrOfPositionSensors () const override |
| Get the number of position sensors exposed by this device. More... | |
| yarp::dev::MAS_status | getPositionSensorStatus (size_t sens_index) const override |
| Get the status of the specified sensor. More... | |
| bool | getPositionSensorName (size_t sens_index, std::string &name) const override |
| Get the name of the specified sensor. More... | |
| bool | getPositionSensorFrameName (size_t sens_index, std::string &frameName) const override |
| Get the name of the frame of the specified sensor. More... | |
| bool | getPositionSensorMeasure (size_t sens_index, yarp::sig::Vector &xyz, double ×tamp) const override |
| Get the last reading of the position sensor as x y z. More... | |
| template<typename Interface > | |
| MAS_status | genericGetStatus (const MAS_SensorType sensorType, size_t &sens_index, const std::vector< Interface * > &subDeviceVec, MAS_status(Interface::*methodPtr)(size_t) const) const |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IMultipleWrapper | |
| virtual | ~IMultipleWrapper () |
| Destructor. More... | |
| Public Member Functions inherited from yarp::dev::IThreeAxisGyroscopes | |
| virtual | ~IThreeAxisGyroscopes () |
| Public Member Functions inherited from yarp::dev::IThreeAxisLinearAccelerometers | |
| virtual | ~IThreeAxisLinearAccelerometers () |
| Public Member Functions inherited from yarp::dev::IThreeAxisMagnetometers | |
| virtual | ~IThreeAxisMagnetometers () |
| Public Member Functions inherited from yarp::dev::IOrientationSensors | |
| virtual | ~IOrientationSensors () |
| Public Member Functions inherited from yarp::dev::ITemperatureSensors | |
| virtual | ~ITemperatureSensors () |
| Public Member Functions inherited from yarp::dev::ISixAxisForceTorqueSensors | |
| virtual | ~ISixAxisForceTorqueSensors () |
| Public Member Functions inherited from yarp::dev::IContactLoadCellArrays | |
| virtual | ~IContactLoadCellArrays () |
| Public Member Functions inherited from yarp::dev::IEncoderArrays | |
| virtual | ~IEncoderArrays () |
| Public Member Functions inherited from yarp::dev::ISkinPatches | |
| virtual | ~ISkinPatches () |
| Public Member Functions inherited from yarp::dev::IPositionSensors | |
| virtual | ~IPositionSensors () |
multipleanalogsensorsremapper : device that takes a list of sensor from multiple analog sensors device and expose them as a single device exposing MultipleAnalogSensors interface.
| YARP device name |
|---|
multipleanalogsensorsremapper |
Parameters required by this device are:
| Parameter name | SubParameter | Type | Units | Default Value | Required | Description | Notes |
|---|---|---|---|---|---|---|---|
| {sensorTag}Names | - | vector of strings | - | - | Yes | Ordered list of name that must belong of the remapped device. The list also defines the index that the sensor will |
The sensorTag is a tag identifing the spefici sensor interface, see Multiple Analog Sensor Interfaces for a list of possible sensors. The tag of each sensor interface is provided in the doxygen documentation of the specific interface.
Configuration file using .ini format.
Configuration of the device from C++ code.
Definition at line 87 of file MultipleAnalogSensorsRemapper.h.
|
overridevirtual |
MultipeWrapper methods.
Implements yarp::dev::IMultipleWrapper.
Definition at line 217 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Close the DeviceDriver.
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 71 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Detach the object (you must have first called attach).
Implements yarp::dev::IMultipleWrapper.
Definition at line 245 of file MultipleAnalogSensorsRemapper.cpp.
| MAS_status MultipleAnalogSensorsRemapper::genericGetStatus | ( | const MAS_SensorType | sensorType, |
| size_t & | sens_index, | ||
| const std::vector< Interface * > & | subDeviceVec, | ||
| MAS_status(Interface::*)(size_t) const | methodPtr | ||
| ) | const |
Definition at line 263 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getContactLoadCellArrayMeasure()-1). |
| [out] | out | The requested measure. The vector should be getContactLoadCellArrayMeasure(sens_index)-dimensional. The measure is expressed in Newton. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 592 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 587 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the size of the specified contact load cell array.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 597 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 582 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfEncoderArrays()-1). |
| [out] | out | The requested measure. The vector should be getEncoderArraySize(sens_index)-dimensional. The measure is expressed in Newton. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IEncoderArrays.
Definition at line 617 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IEncoderArrays.
Definition at line 612 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the size of the specified encoder array.
Implements yarp::dev::IEncoderArrays.
Definition at line 622 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IEncoderArrays.
Definition at line 607 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of contact load cell array exposed by this device.
Implements yarp::dev::IContactLoadCellArrays.
Definition at line 577 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of encoder arrays exposed by this device.
Implements yarp::dev::IEncoderArrays.
Definition at line 602 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of orientation sensors exposed by this device.
Implements yarp::dev::IOrientationSensors.
Definition at line 494 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of position sensors exposed by this device.
Implements yarp::dev::IPositionSensors.
Definition at line 469 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of six axis force torque sensors exposed by this device.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 552 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of skin patches exposed by this device.
Implements yarp::dev::ISkinPatches.
Definition at line 627 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of temperature sensors exposed by this device.
Implements yarp::dev::ITemperatureSensors.
Definition at line 519 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of three axis gyroscopes exposed by this sensor.
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 394 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of three axis linear accelerometers exposed by this device.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 419 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the number of magnetometers exposed by this device.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 444 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 509 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the orientation sensor as roll pitch yaw.
If  is the lab or surface fixed frame, and
is the lab or surface fixed frame, and  is the sensor-fixed frame, this methods returns the angles
is the sensor-fixed frame, this methods returns the angles ![$ r \in [-180, 180] , p \in [-90, 90], y \in [-180, 180]$](form_2.png) such that
such that
![\[ {}^f R_s = RotZ\left(\frac{\pi}{180}y\right)*RotY\left(\frac{\pi}{180}p\right)*RotX\left(\frac{\pi}{180}r\right) \]](form_3.png)
with
![\[ RotZ(\theta) = \begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0 \\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \\ \end{bmatrix} \]](form_4.png)
,
![\[ RotY(\theta) = \begin{bmatrix} \cos(\theta) & 0 & \sin(\theta) \\ 0 & 1 & 0 \\ -\sin(\theta) & 0 & \cos(\theta) \\ \end{bmatrix} \]](form_5.png)
and
![\[ RotX(\theta) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos(\theta) & - \sin(\theta) \\ 0 & \sin(\theta) & \cos(\theta) \\ \end{bmatrix} \]](form_6.png)
where  is the rotation that left-multiplied by a 3d column vector expressed in it returns it expressed in .
is the rotation that left-multiplied by a 3d column vector expressed in it returns it expressed in .
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfOrientationSensors()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in degrees . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IOrientationSensors.
Definition at line 514 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 504 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IOrientationSensors.
Definition at line 499 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 484 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the position sensor as x y z.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfPositionSensors()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in meters. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IPositionSensors.
Definition at line 489 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 479 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IPositionSensors.
Definition at line 474 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 567 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfSixAxisForceTorqueSensors()-1). |
| [out] | out | The requested measure. The vector should be 6-dimensional. The measure is expressed in Newton for the first three elements, Newton Meters for the last three elements. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 572 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 562 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ISixAxisForceTorqueSensors.
Definition at line 557 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfSkinPatches()-1). |
| [out] | out | The requested measure. The vector should be getNrOfSkinPatches(sens_index)-dimensional. The measure is expressed in implementation-specific unit of measure. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ISkinPatches.
Definition at line 642 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ISkinPatches.
Definition at line 637 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the size of the specified skin patch.
Implements yarp::dev::ISkinPatches.
Definition at line 647 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ISkinPatches.
Definition at line 632 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 534 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
TODO(traversaro) : make the method swig-friendly
Implements yarp::dev::ITemperatureSensors.
Definition at line 544 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfTemperatureSensors()-1). |
| [out] | out | The requested measure. The vector should be 1-dimensional. The measure is expressed in celsius degrees . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::ITemperatureSensors.
Definition at line 539 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 529 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::ITemperatureSensors.
Definition at line 524 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 409 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the gyroscope.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in degrees/seconds. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 414 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 404 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisGyroscopes()-1). |
Implements yarp::dev::IThreeAxisGyroscopes.
Definition at line 399 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 434 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisLinearAccelerometers()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in meters^2/seconds. |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 439 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 429 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IThreeAxisLinearAccelerometers.
Definition at line 424 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the frame of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 459 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the last reading of the specified sensor.
| [in] | sens_index | The index of the specified sensor (should be between 0 and getNrOfThreeAxisMagnetometers()-1). |
| [out] | out | The requested measure. The vector should be 3-dimensional. The measure is expressed in tesla . |
| [out] | timestamp | The timestamp of the requested measure, expressed in seconds. |
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 464 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the name of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 454 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Get the status of the specified sensor.
Implements yarp::dev::IThreeAxisMagnetometers.
Definition at line 449 of file MultipleAnalogSensorsRemapper.cpp.
|
overridevirtual |
Open the DeviceDriver.
| config | is a list of parameters for the device. Which parameters are effective for your device can vary. See device invocation examples. If there is no example for your device, you can run the "yarpdev" program with the verbose flag set to probe what parameters the device is checking. If that fails too, you'll need to read the source code (please nag one of the yarp developers to add documentation for your device). |
Reimplemented from yarp::dev::DeviceDriver.
Definition at line 76 of file MultipleAnalogSensorsRemapper.cpp.