|
YARP
Yet Another Robot Platform
|


|
|
YARP
Yet Another Robot Platform
|
|
usbCameraRaw: Documentation to be added
More...
#include <usbCamera/common/USBcamera.h>
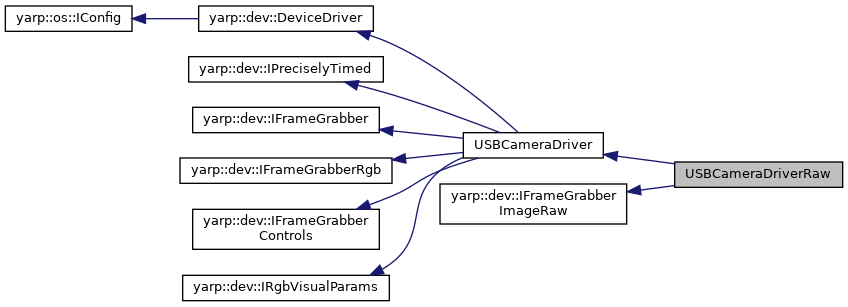
 Inheritance diagram for USBCameraDriverRaw:
Inheritance diagram for USBCameraDriverRaw:Public Member Functions | |
| USBCameraDriverRaw () | |
| ~USBCameraDriverRaw () override | |
| bool | getImage (yarp::sig::ImageOf< yarp::sig::PixelMono > &image) override |
| FrameGrabber image interface, returns the last acquired frame as an rgb image. More... | |
| int | height () const override |
| Return the height of each frame. More... | |
| int | width () const override |
| Return the width of each frame. More... | |
| Public Member Functions inherited from USBCameraDriver | |
| USBCameraDriver () | |
| Constructor. More... | |
| ~USBCameraDriver () override | |
| Destructor. More... | |
| bool | open (yarp::os::Searchable &config) override |
| Open the device driver. More... | |
| bool | close () override |
| Closes the device driver. More... | |
| bool | getRawBuffer (unsigned char *buffer) override |
| Implements FrameGrabber basic interface. More... | |
| int | getRawBufferSize () override |
| Implements the Frame grabber basic interface. More... | |
| bool | getRgbBuffer (unsigned char *buffer) override |
| FrameGrabber bgr interface, returns the last acquired frame as a buffer of bgr triplets. More... | |
| yarp::os::Stamp | getLastInputStamp () override |
| Implements the IPreciselyTimed interface. More... | |
| bool | getCameraDescription (CameraDescriptor *camera) override |
| Implementation of IFrameGrabberControls2 interface. More... | |
| bool | hasFeature (int feature, bool *hasFeature) override |
| Check if camera has the requested feature (saturation, brightness ... More... | |
| bool | setFeature (int feature, double value) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| bool | getFeature (int feature, double *value) override |
| Get the current value for the requested feature. More... | |
| bool | setFeature (int feature, double value1, double value2) override |
| Set the requested feature to a value using 2 params (like white balance) More... | |
| bool | getFeature (int feature, double *value1, double *value2) override |
| Get the current value for the requested feature. More... | |
| bool | hasOnOff (int feature, bool *HasOnOff) override |
| Check if the camera has the ability to turn on/off the requested feature. More... | |
| bool | setActive (int feature, bool onoff) override |
| Set the requested feature on or off. More... | |
| bool | getActive (int feature, bool *isActive) override |
| Get the current status of the feature, on or off. More... | |
| bool | hasAuto (int feature, bool *hasAuto) override |
| Check if the requested feature has the 'auto' mode. More... | |
| bool | hasManual (int feature, bool *hasManual) override |
| Check if the requested feature has the 'manual' mode. More... | |
| bool | hasOnePush (int feature, bool *hasOnePush) override |
| Check if the requested feature has the 'onePush' mode. More... | |
| bool | setMode (int feature, FeatureMode mode) override |
| Set the requested mode for the feature. More... | |
| bool | getMode (int feature, FeatureMode *mode) override |
| Get the current mode for the feature. More... | |
| bool | setOnePush (int feature) override |
| Set the requested feature to a value (saturation, brightness ... More... | |
| int | getRgbHeight () override |
| Return the height of each frame. More... | |
| int | getRgbWidth () override |
| Return the width of each frame. More... | |
| bool | getRgbSupportedConfigurations (yarp::sig::VectorOf< yarp::dev::CameraConfig > &configurations) override |
| Get the possible configurations of the camera. More... | |
| bool | getRgbResolution (int &width, int &height) override |
| Get the resolution of the rgb image from the camera. More... | |
| bool | setRgbResolution (int width, int height) override |
| Set the resolution of the rgb image from the camera. More... | |
| bool | getRgbFOV (double &horizontalFov, double &verticalFov) override |
| Get the field of view (FOV) of the rgb camera. More... | |
| bool | setRgbFOV (double horizontalFov, double verticalFov) override |
| Set the field of view (FOV) of the rgb camera. More... | |
| bool | getRgbIntrinsicParam (yarp::os::Property &intrinsic) override |
| Get the intrinsic parameters of the rgb camera. More... | |
| bool | getRgbMirroring (bool &mirror) override |
| Get the mirroring setting of the sensor. More... | |
| bool | setRgbMirroring (bool mirror) override |
| Set the mirroring setting of the sensor. More... | |
| Public Member Functions inherited from yarp::dev::DeviceDriver | |
| ~DeviceDriver () override=default | |
| Destructor. More... | |
| template<class T > | |
| bool | view (T *&x) |
| Get an interface to the device driver. More... | |
| virtual DeviceDriver * | getImplementation () |
| Some drivers are bureaucrats, pointing at others. More... | |
| Public Member Functions inherited from yarp::os::IConfig | |
| virtual | ~IConfig () |
| Destructor. More... | |
| virtual bool | configure (Searchable &config) |
| Change online parameters. More... | |
| Public Member Functions inherited from yarp::dev::IPreciselyTimed | |
| virtual | ~IPreciselyTimed () |
| Public Member Functions inherited from yarp::dev::IFrameGrabber | |
| virtual | ~IFrameGrabber () |
| Public Member Functions inherited from yarp::dev::IFrameGrabberRgb | |
| virtual | ~IFrameGrabberRgb () |
| Public Member Functions inherited from yarp::dev::IFrameGrabberControls | |
| virtual | ~IFrameGrabberControls () |
| Destructor. More... | |
| virtual bool | setBrightness (double v) |
| Set the brightness. More... | |
| virtual bool | setExposure (double v) |
| Set the exposure. More... | |
| virtual bool | setSharpness (double v) |
| Set the sharpness. More... | |
| virtual bool | setWhiteBalance (double blue, double red) |
| Set the white balance for the frame grabber. More... | |
| virtual bool | setHue (double v) |
| Set the hue. More... | |
| virtual bool | setSaturation (double v) |
| Set the saturation. More... | |
| virtual bool | setGamma (double v) |
| Set the gamma. More... | |
| virtual bool | setShutter (double v) |
| Set the shutter parameter. More... | |
| virtual bool | setGain (double v) |
| Set the gain. More... | |
| virtual bool | setIris (double v) |
| Set the iris. More... | |
| virtual double | getBrightness () |
| Read the brightness parameter. More... | |
| virtual double | getExposure () |
| Read the exposure parameter. More... | |
| virtual double | getSharpness () |
| Read the sharpness parameter. More... | |
| virtual bool | getWhiteBalance (double &blue, double &red) |
| Read the white balance parameters. More... | |
| virtual double | getHue () |
| Read the hue parameter. More... | |
| virtual double | getSaturation () |
| Read the saturation parameter. More... | |
| virtual double | getGamma () |
| Read the gamma parameter. More... | |
| virtual double | getShutter () |
| Read the shutter parameter. More... | |
| virtual double | getGain () |
| Read the gain parameter. More... | |
| virtual double | getIris () |
| Read the iris parameter. More... | |
| cameraFeature_id_t | featureVOCABEnum (int vocab) |
| int | featureEnum2Vocab (cameraFeature_id_t _enum) |
| std::string | busType2String (BusType type) |
| FeatureMode | toFeatureMode (bool _auto) |
| Public Member Functions inherited from yarp::dev::IRgbVisualParams | |
| virtual | ~IRgbVisualParams () |
| Public Member Functions inherited from yarp::dev::IFrameGrabberImageRaw | |
| virtual | ~IFrameGrabberImageRaw () |
| Destructor. More... | |
| virtual bool | getImageCrop (cropType_id_t cropType, yarp::sig::VectorOf< std::pair< int, int > > vertices, yarp::sig::ImageOf< yarp::sig::PixelMono > &image) |
| Get a crop of the rgb image from the frame grabber, if required demosaicking/color reconstruction is applied. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from USBCameraDriver | |
| yarp::dev::IFrameGrabberRgb * | deviceRgb |
| yarp::dev::IPreciselyTimed * | deviceTimed |
| yarp::dev::IFrameGrabber * | deviceRaw |
| yarp::dev::DeviceDriver * | os_device |
| yarp::dev::IFrameGrabberControls * | deviceControls |
| yarp::dev::IRgbVisualParams * | deviceRgbVisualParam |
| size_t | _width |
| size_t | _height |
| int | pixelType |
usbCameraRaw: Documentation to be added
Definition at line 278 of file USBcamera.h.
| USBCameraDriverRaw::USBCameraDriverRaw | ( | ) |
Definition at line 290 of file USBcamera.cpp.
|
override |
Definition at line 297 of file USBcamera.cpp.
|
overridevirtual |
FrameGrabber image interface, returns the last acquired frame as an rgb image.
A demosaicking method is applied to reconstuct the color from the Bayer pattern of the sensor.
| image | that will store the last frame. |
Implements yarp::dev::IFrameGrabberImageRaw.
Definition at line 302 of file USBcamera.cpp.
|
overridevirtual |
Return the height of each frame.
Implements yarp::dev::IFrameGrabberImageRaw.
Definition at line 317 of file USBcamera.cpp.
|
overridevirtual |
Return the width of each frame.
Implements yarp::dev::IFrameGrabberImageRaw.
Definition at line 312 of file USBcamera.cpp.